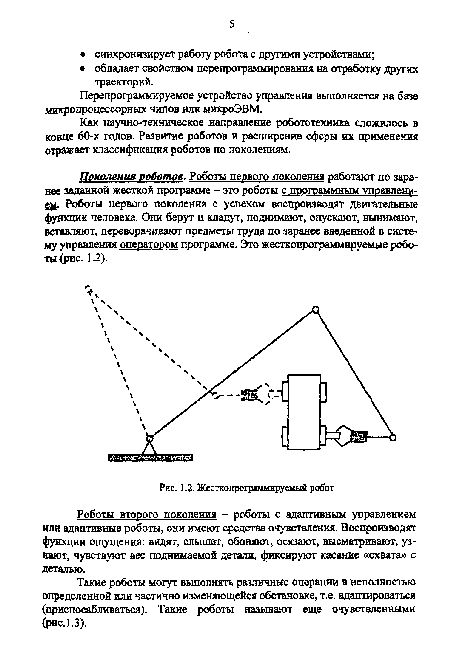
| Жесткопрограммируемый робот |
 |
Далее
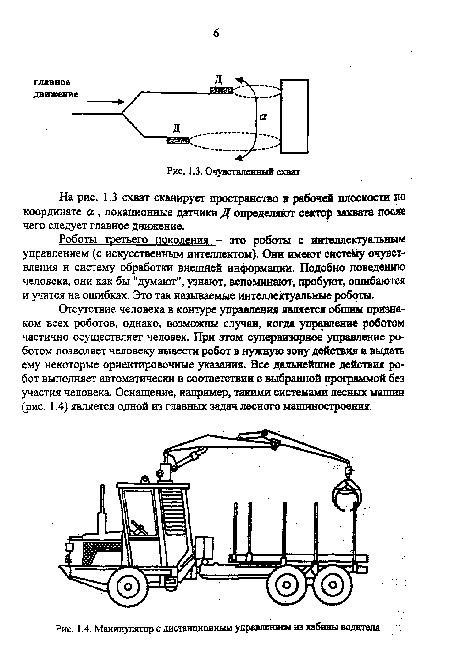
| Манипулятор с дистанционным управлением из кабины водителя |
 |
Далее
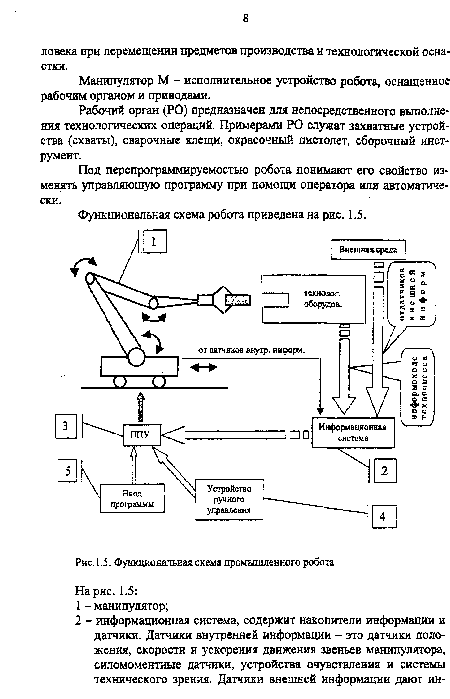
| Функциональная схема промышленного робота |
 |
Далее
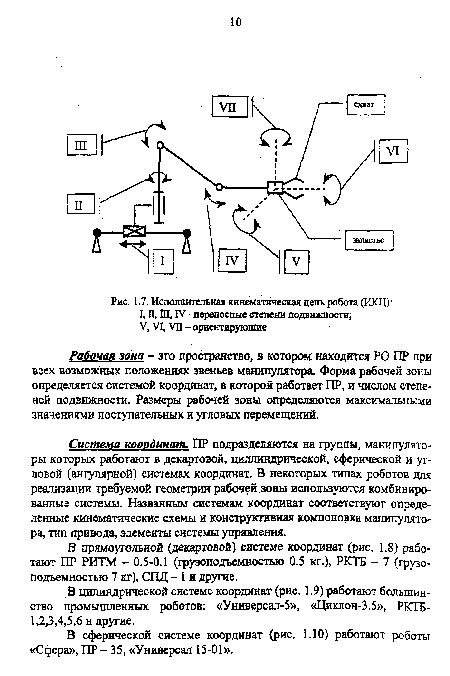
| Исполнительная кинематическая цепь робота (ИКЦ) |
 |
Далее
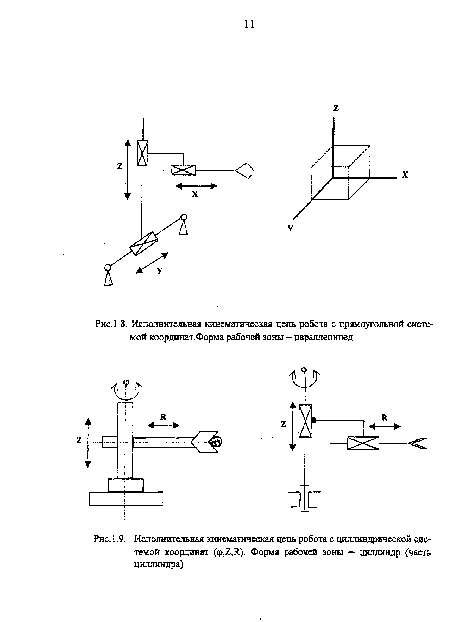
| Исполнительная кинематическая цепь робота с прямоугольной системой координат.Форма рабочей зоны — парагшепипед |
 |
Далее
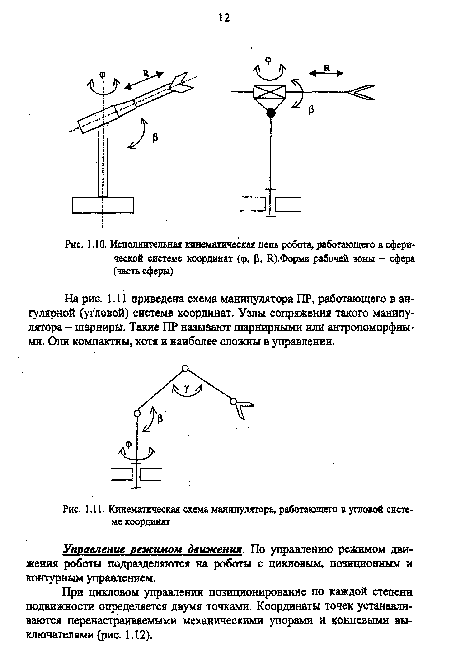
| Кинематическая схема манипулятора, работающего в угловой систе- |
 |
Далее
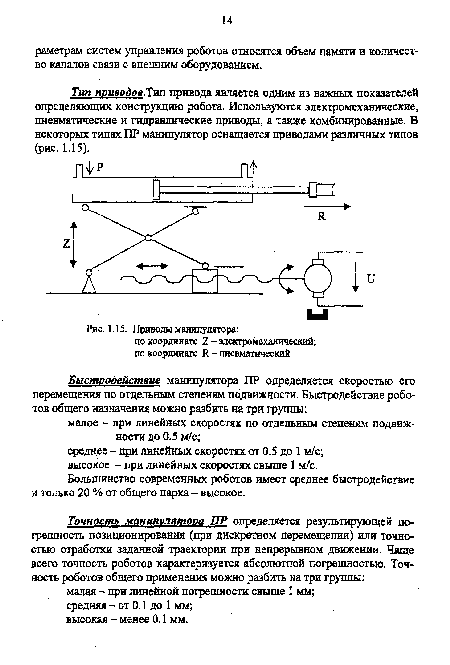
| Приводы манипулятора |
 |
Далее
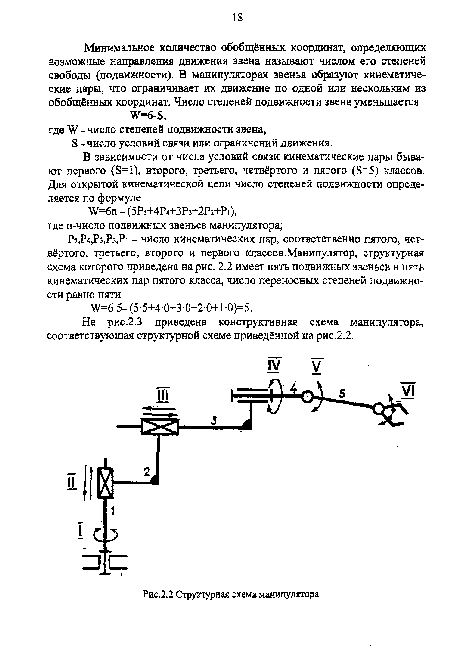
| Структурная схема манипулятора |
 |
Далее
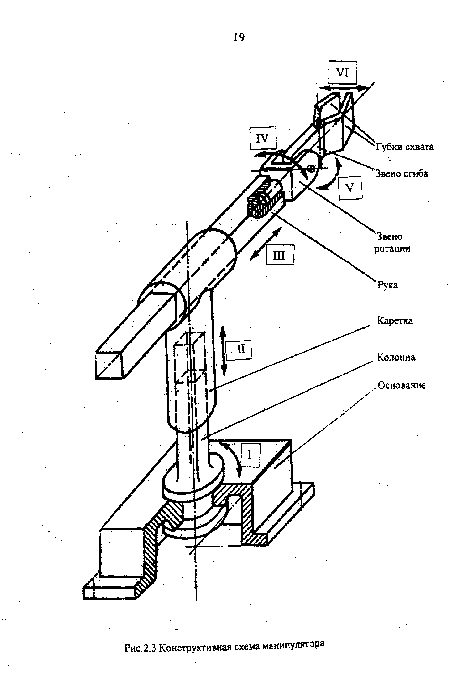
| Конструктивная схема манипулятора |
 |
Далее
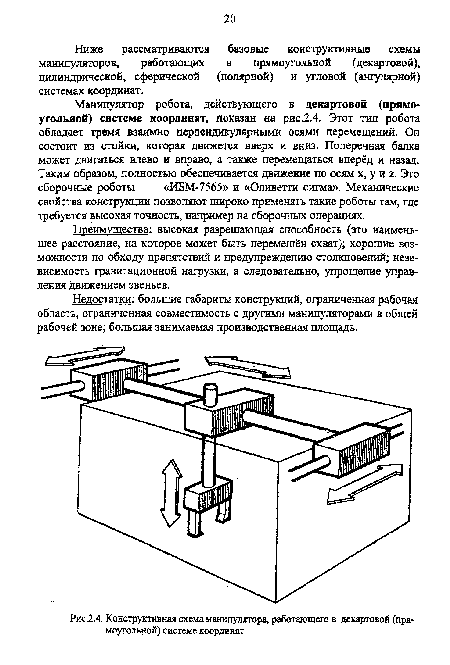
| Конструктивная схема манипулятора, работающего в декартовой (пря- |
 |
Далее
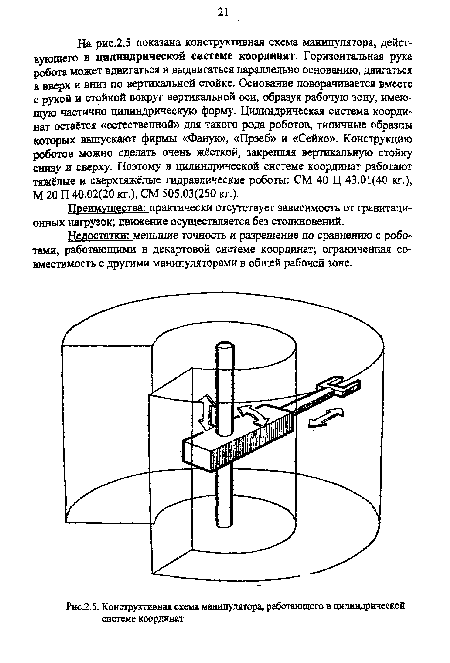
| Конструктивная схема манипулятора, работающего в цилиндрической |
 |
Далее
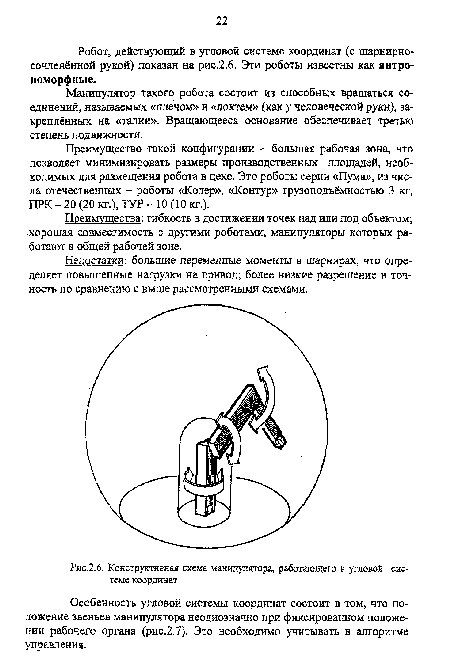
| Конструктивная схема манипулятора, работающего в угловой системе координат |
 |
Далее
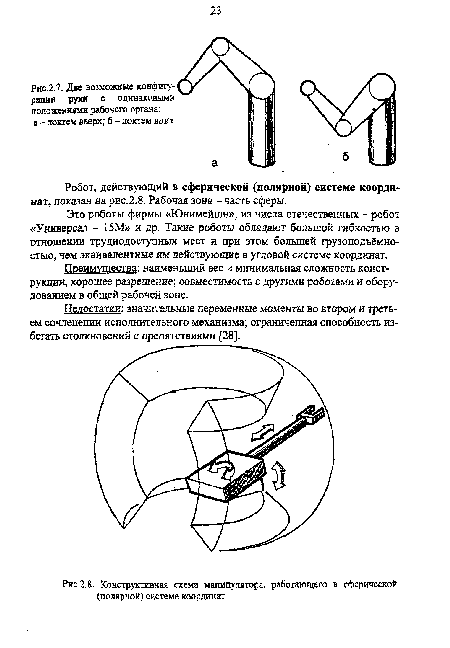
| Две возможные конфигурации руки с одинаковыми положениями рабочего органа |
 |
Далее
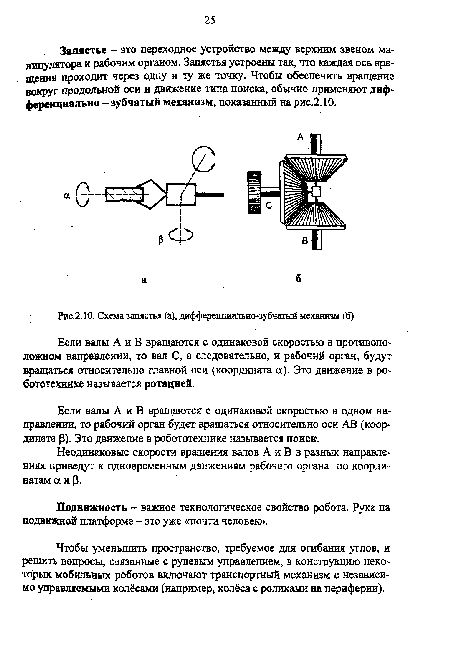
| Конструктивная схема манипулятора, работающего в сферической |
|
Далее
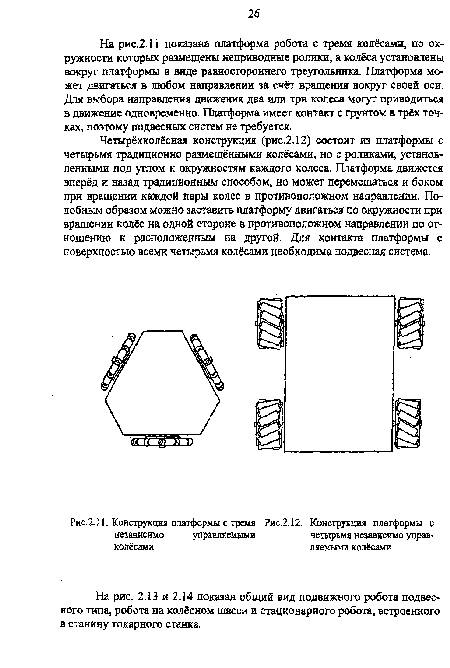
| Схема запястья (а), дифференциально-зубчатый механизм (б) |
 |
Далее
| Конструкция платформы с тремя |
 |
Далее
| Конструкция платформы с независимо управляемыми четырьмя независимо управ- |
|
Далее
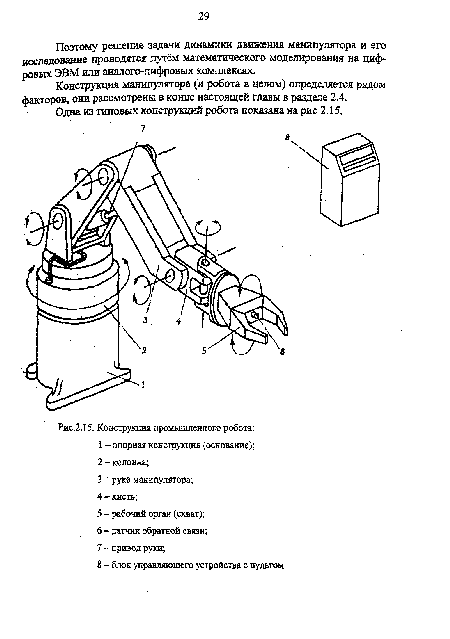
| Конструкция промышленного робота |
 |
Далее
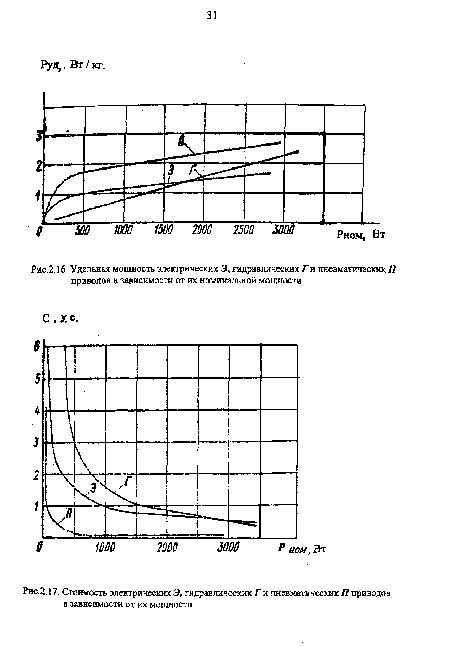
| Удельная мощность электрических Э, гидравлических Г и пневматических П приводов в зависимости от их номинальной мощности |
 |
Далее
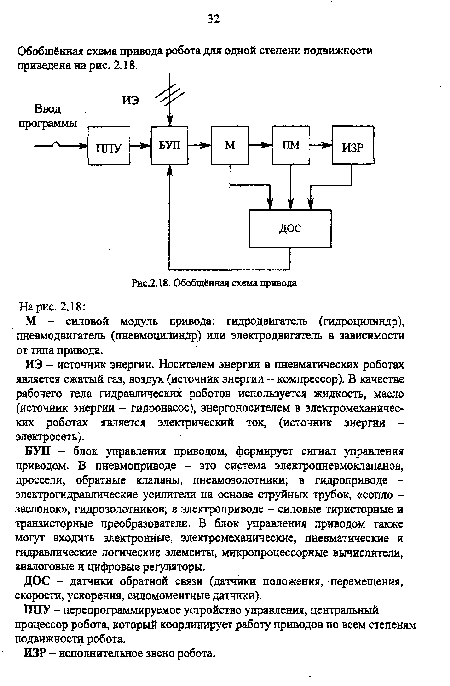
| Стоимость электрических Э, гидравлических Г и пневматических Я приводов |
|
Далее
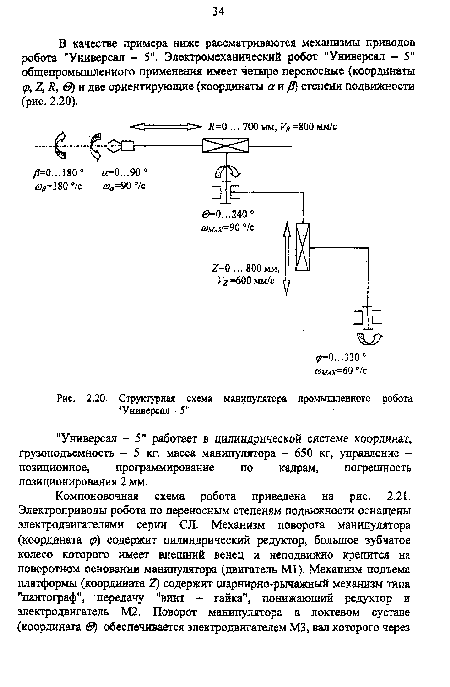
| Обобщённая схема привода |
 |
Далее
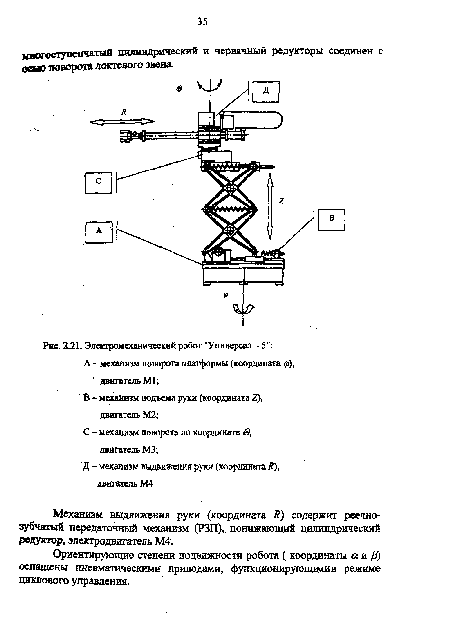
| Структурная схема манипулятора промышленного робота "Универсал - 5" |
 |
Далее
| Электромеханический робот "Универсал - 5" |
 |
Далее
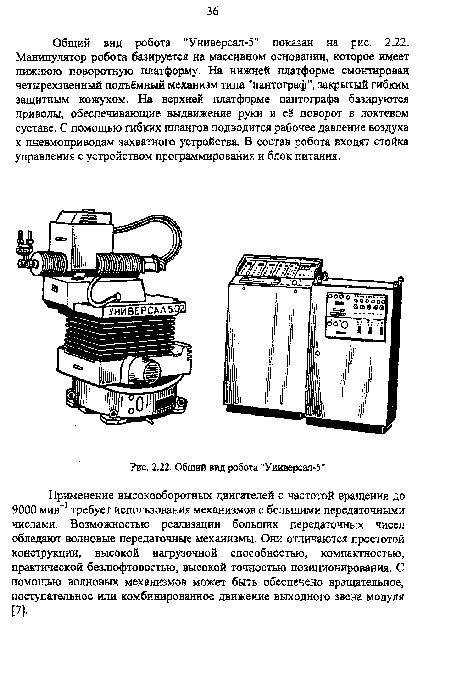
| Общий вид робота "Универсал-5 |
 |
Далее
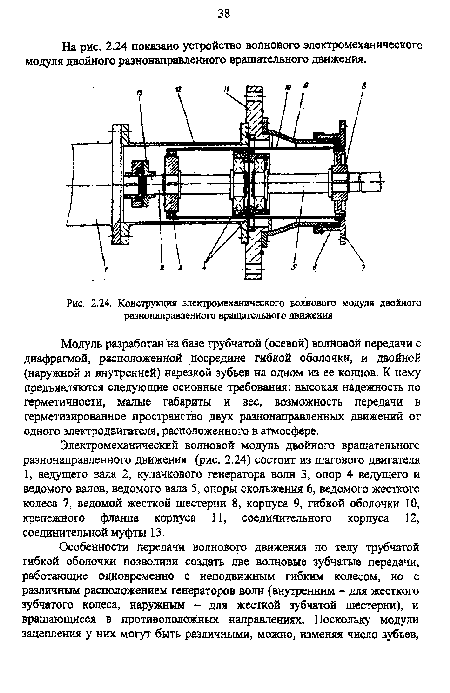
| Конструкция электромеханического волнового модуля двойного разнонаправленного вращательного движения |
 |
Далее
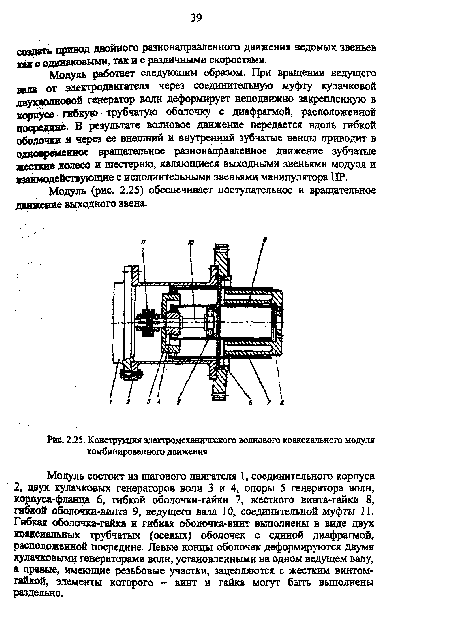
| Конструкция электромеханического волнового коаксиального модуля комбинированного движения |
 |
Далее
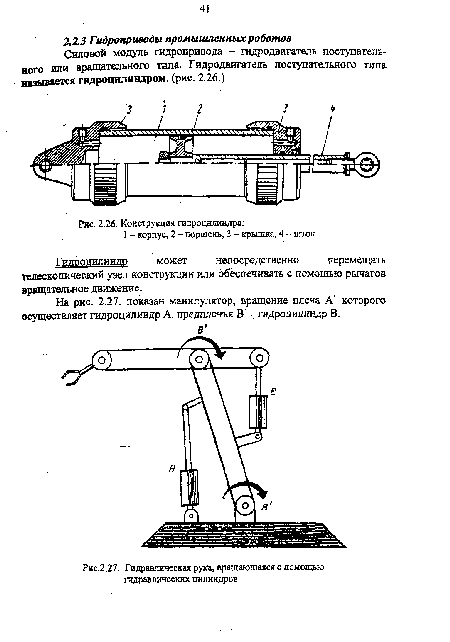
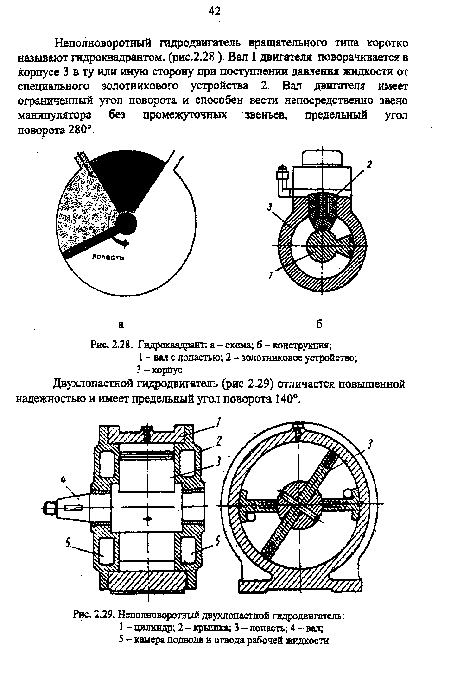
| Гидравлическая рука, вращающаяся с помощью гидравлических цилиндров |
 |
Далее
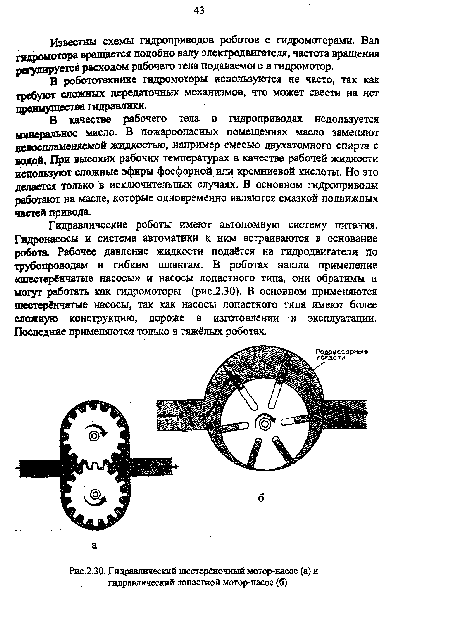
| Неполноворотвый двухлопастной гидродвигателы 1 - цилиндр; 2-крышка; 3 - лопасть; 4 - вал; |
 |
Далее
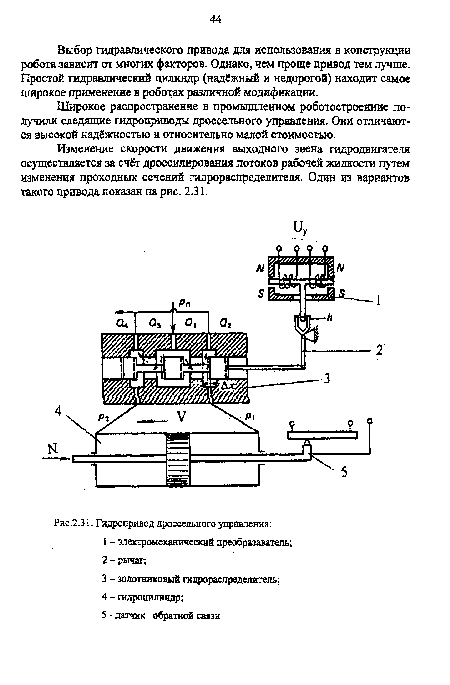
| Гидравлический шестерёночный мотор-насос (а) и гидравлический лопастной мотор-насос (б) |
 |
Далее
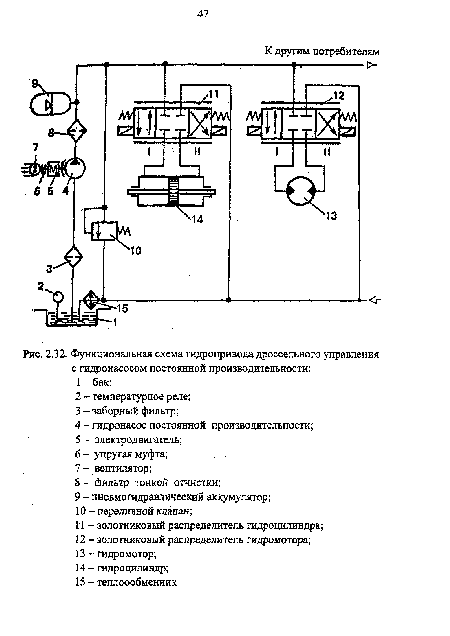
| Гидропривод дроссельного управления |
 |
Далее
| Функциональная схема гидропривода дроссельного управления с гидронасосом постоянной производительности |
 |
Далее
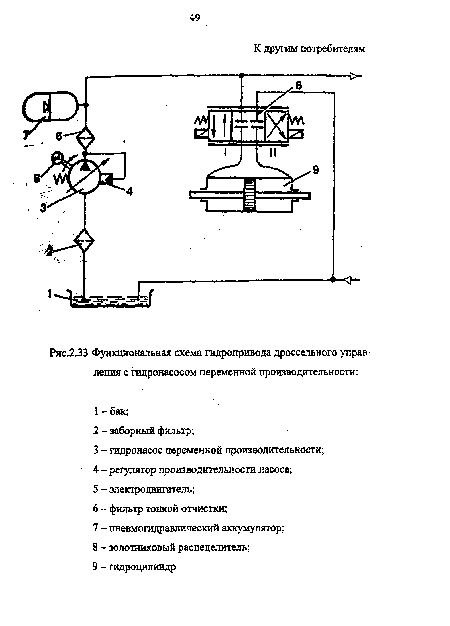
| Функциональная схема гидропривода дроссельного управления с гидронасосом переменной производительности |
 |
Далее
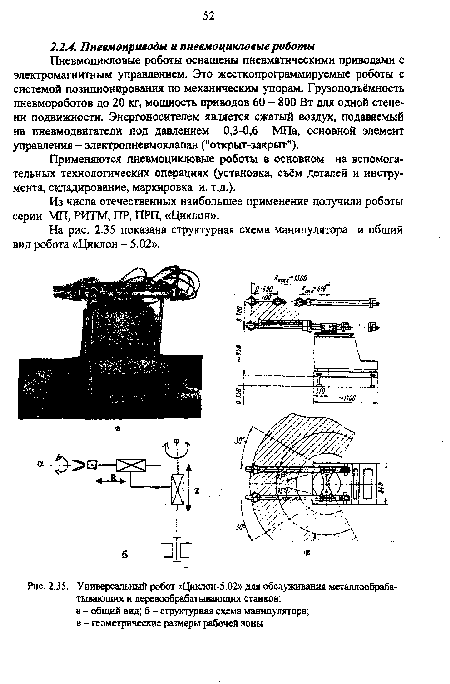
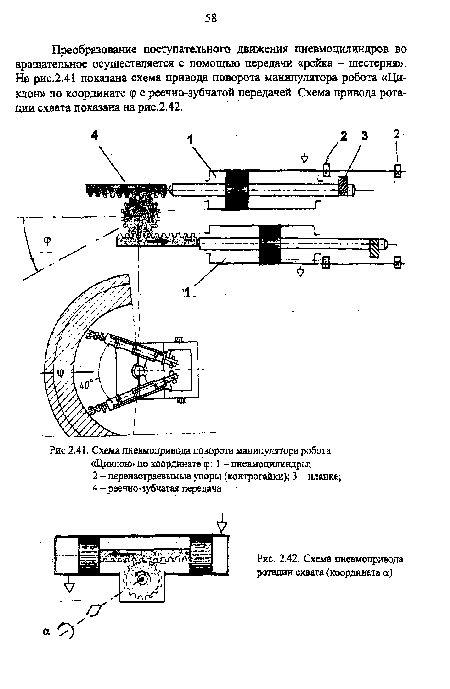
| Универсальный робот «Циклон-5.02» для обслуживания металлообрабатывающих и деревообрабатывающих станков |
 |
Далее
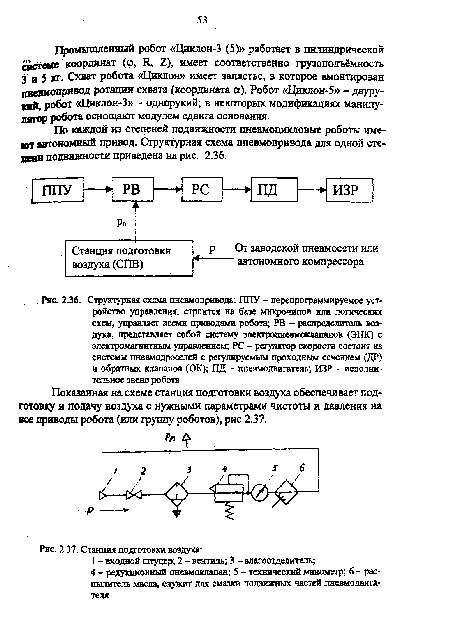
| Станция подготовки воздуха |
 |
Далее
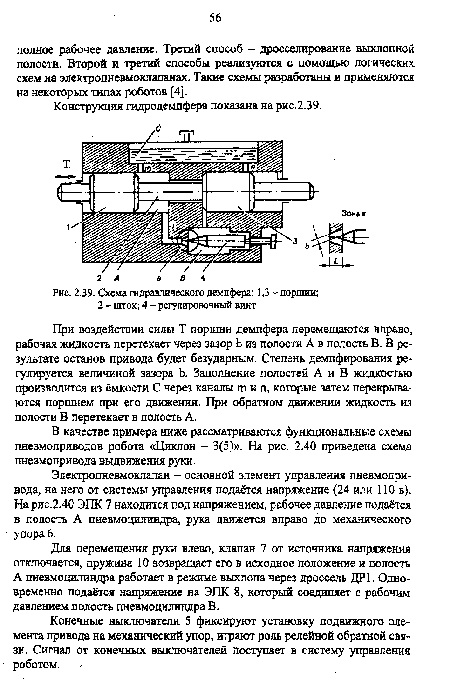
| Схема гидравлического демпфера |
 |
Далее
| Схема пневмопривода ротации схвата (координата а) |
 |
Далее
| Конструктивно-кинематическая схема ориентирующего робота РО-6 |
 |
Далее
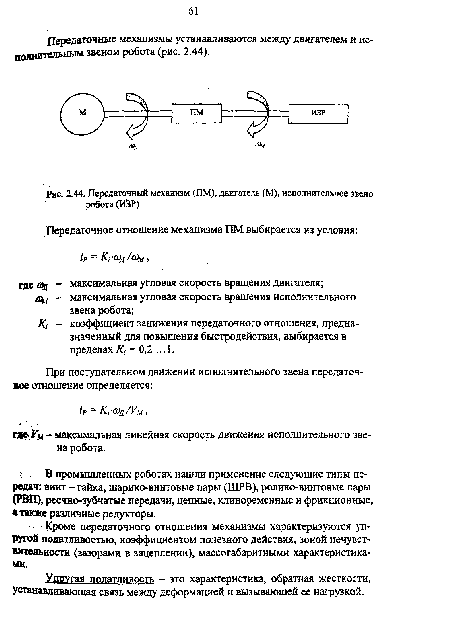
| Передаточный механизм (ПМ), двигатель (М), исполнительное звено робота (ИЗР) |
 |
Далее
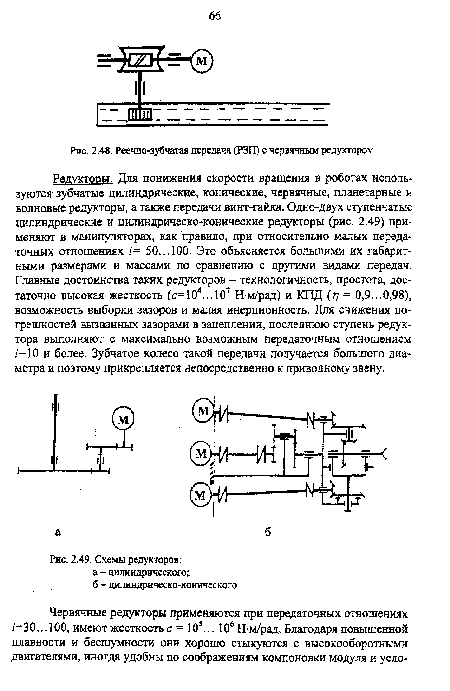
| Реечно-зубчатая передача (РЗП) с червячным редуктором |
 |
Далее
| Схемы редукторов |
|
Далее
| Схема шарнирно-рычажного механизма типа "пантограф" с передачей "винт-гайка" |
 |
Далее
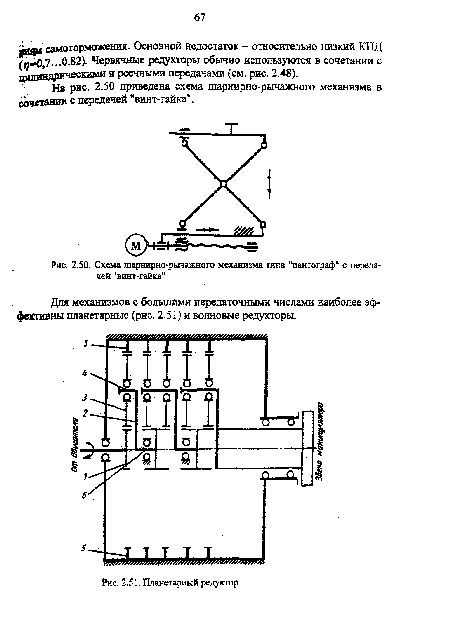
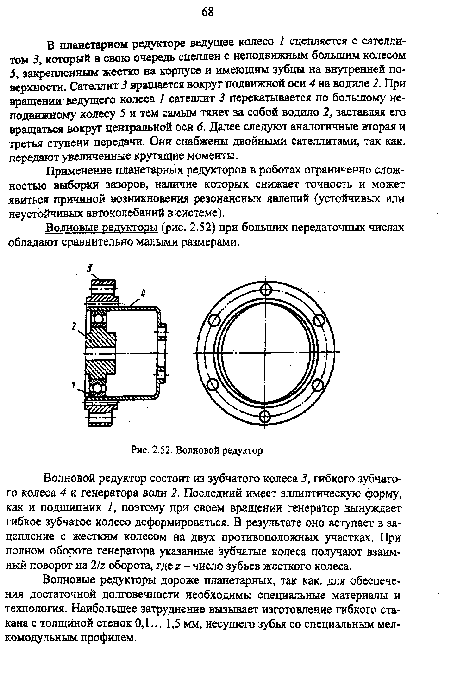
| Волновой редуктор |
 |
Далее
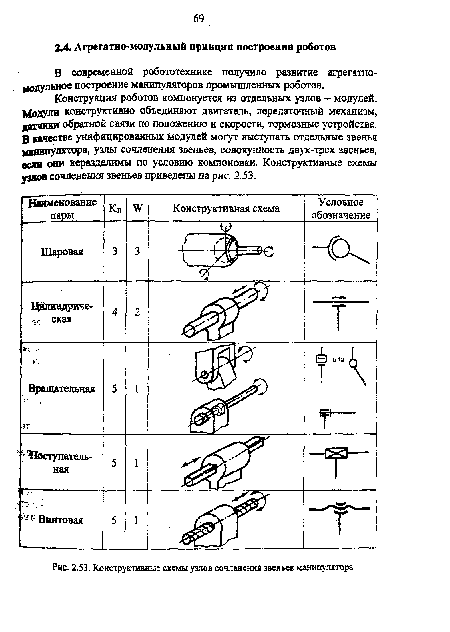
| Конструктивные схемы узлов сочленения звеньев манипулятора |
 |
Далее
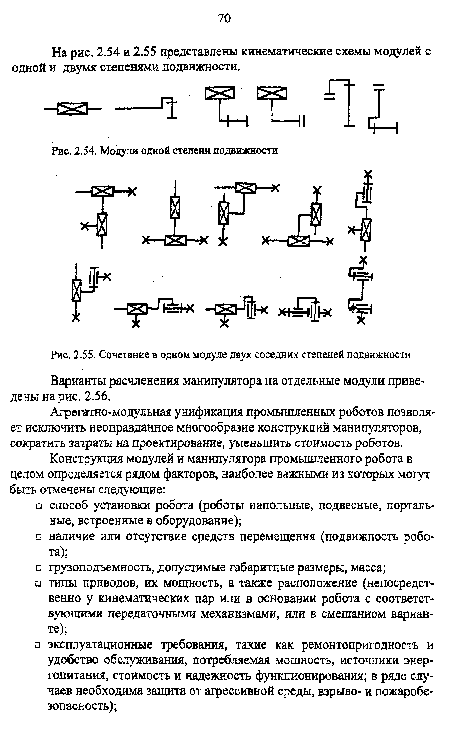
| Сочетание в одном модуле двух соседних степеней подвижности |
 |
Далее
| Модули одной степени подвижности |
|
Далее
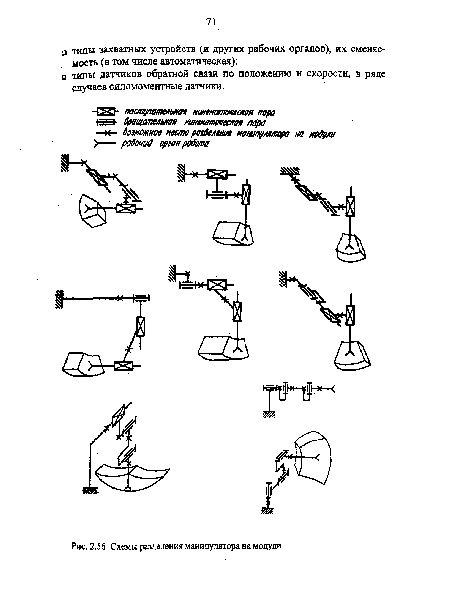
| Схемы разделения манипулятора на модули |
 |
Далее
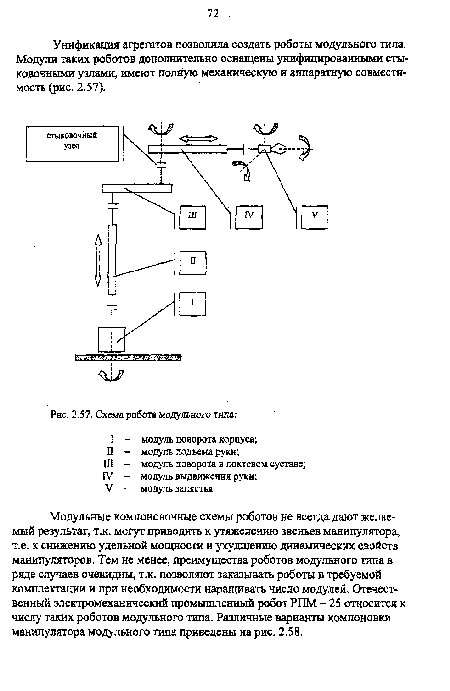
| Схема робота модульного типа |
 |
Далее
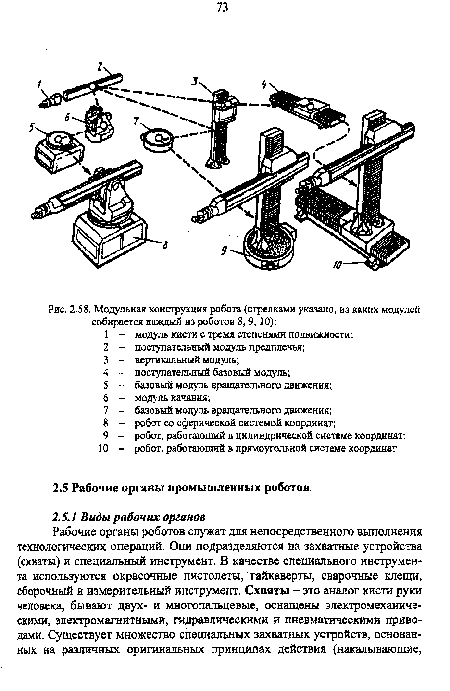
| Модульная конструкция робота (стрелками указано, из каких модулей собирается каждый из роботов 8,9, 10) |
 |
Далее
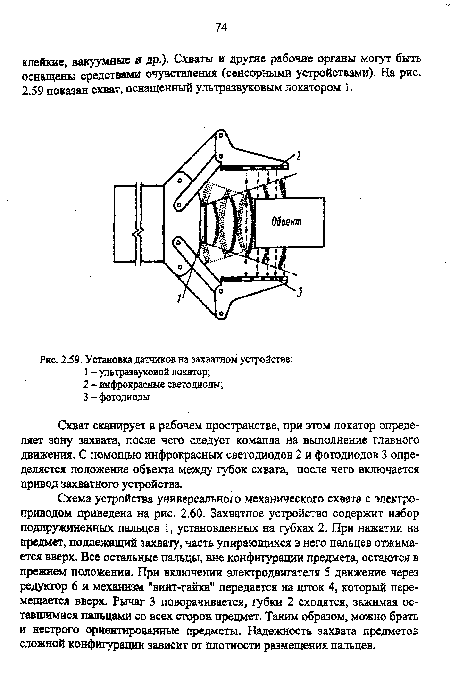
| Установка датчиков на захватном устройстве |
 |
Далее
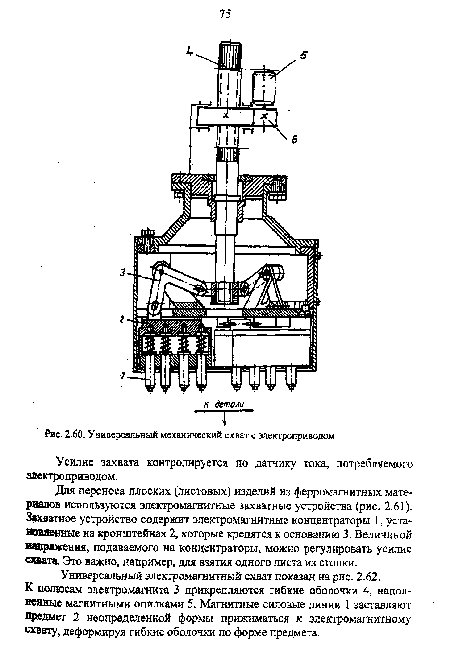
| Универсальный механический схват с электроприводом |
 |
Далее
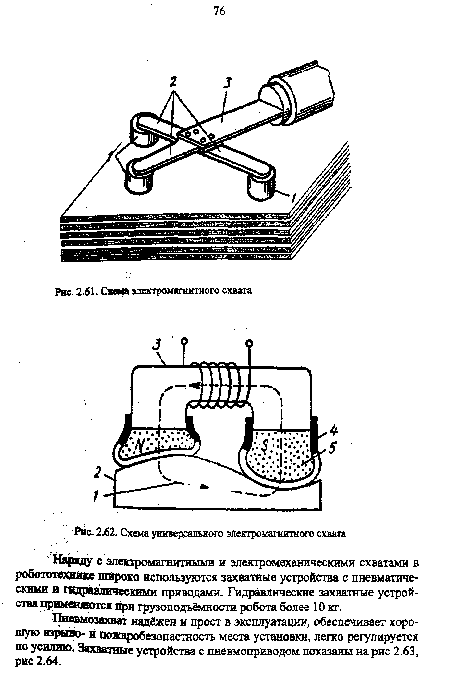
| Схема универсального электромагнитного схвати |
 |
Далее
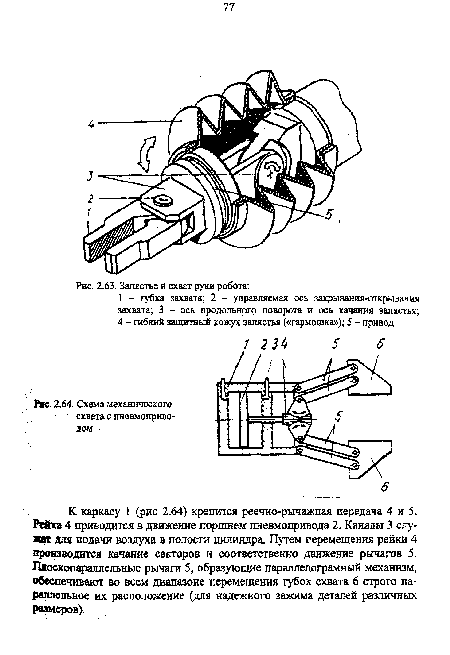
| Схема механического схвата с пневмоприводом |
 |
Далее
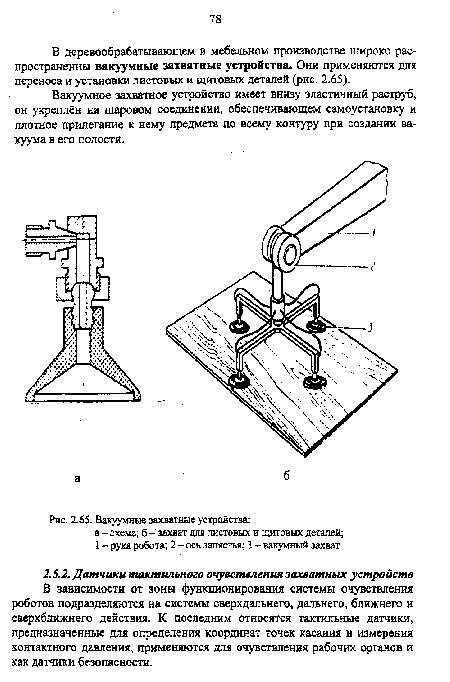
| Вакуумные захватные устройства |
 |
Далее
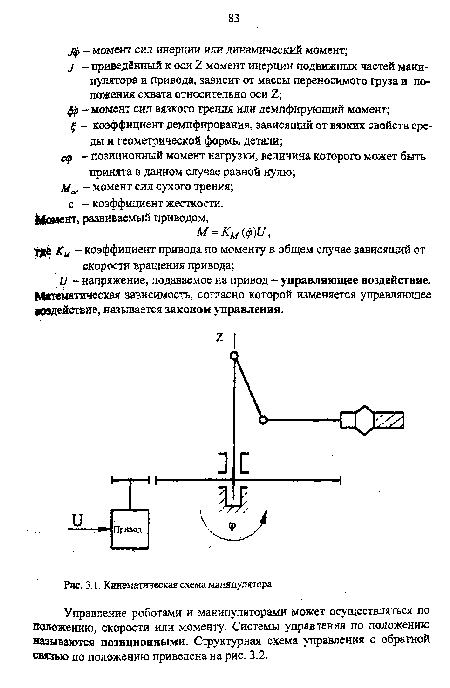
| Кинематическая схема манипулятора |
 |
Далее
| Структурная схема позиционной системы управления с обратной |
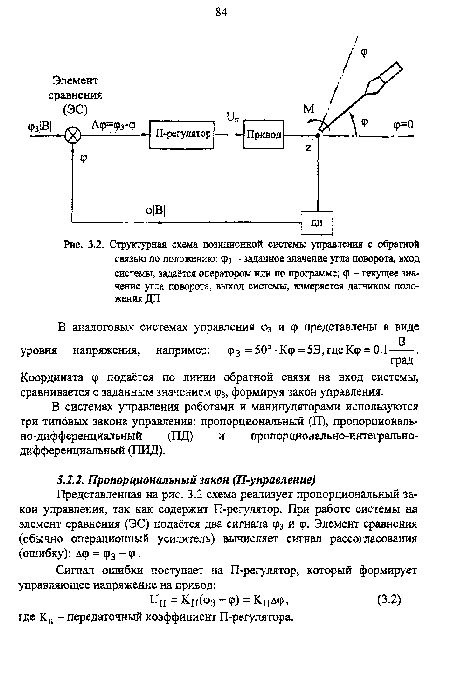 |
Далее
| Математическая модель манипулятора (координата ф) с позиционной системой П-упрааления |
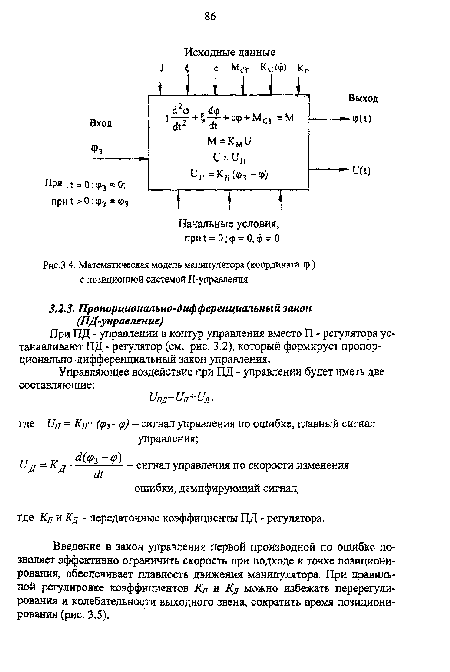 |
Далее
| Статическая нагрузка на привод манипулятора при подъеме груза (а) и график изменения выходной координаты <р (б) |
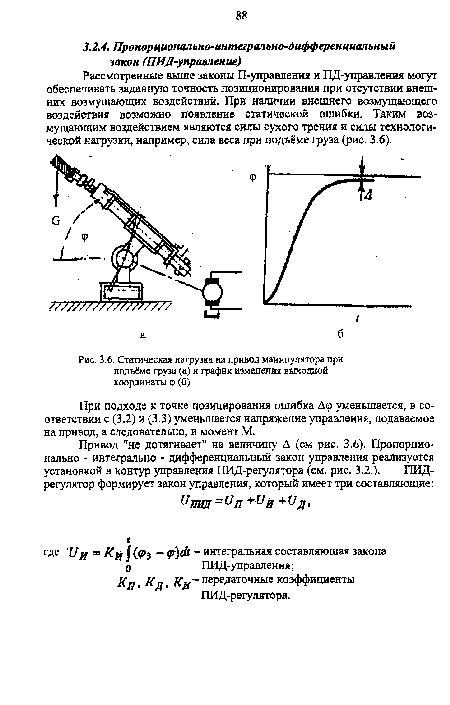 |
Далее
| Схема операционного усилителя |
 |
Далее
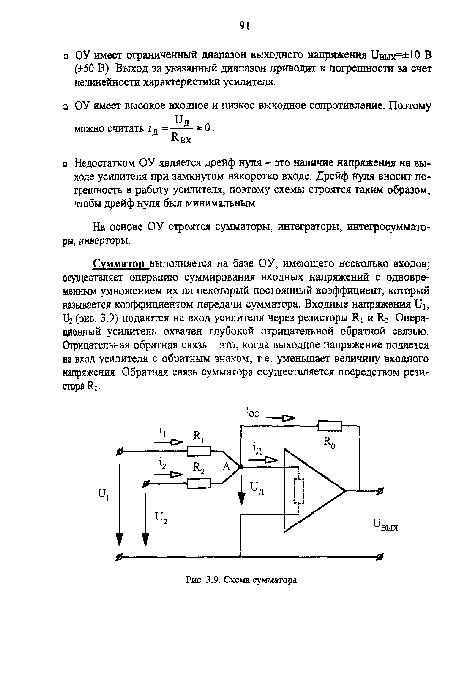
| Схема сумматора |
 |
Далее
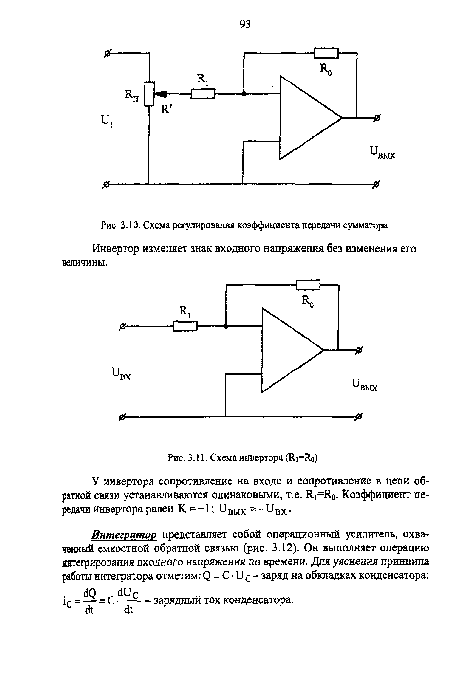
| Схема регулирования коэффициента передачи сумматора |
 |
Далее
| Схема инвертора (Я!=11<|) |
|
Далее
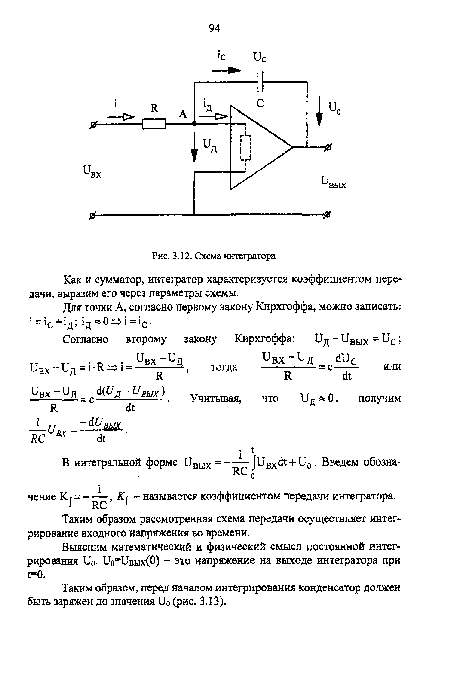
| Схема интегратора |
 |
Далее
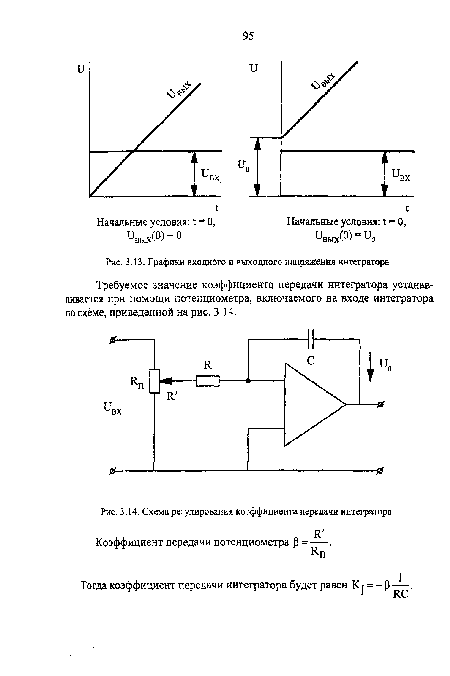
| Графики входного и выходного напряжения интегратора |
 |
Далее
| Схема регулирования коэффициента передачи интегратора |
|
Далее
| Схемы регуляторов на операционных усилителях |
 |
Далее
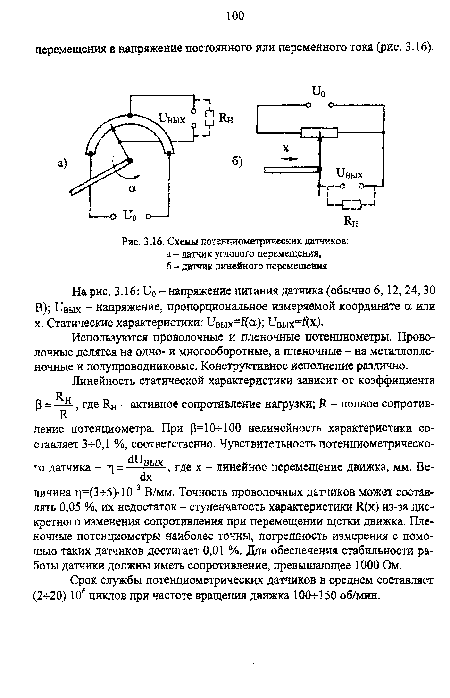
| Схемы потенциометрических датчиков |
 |
Далее
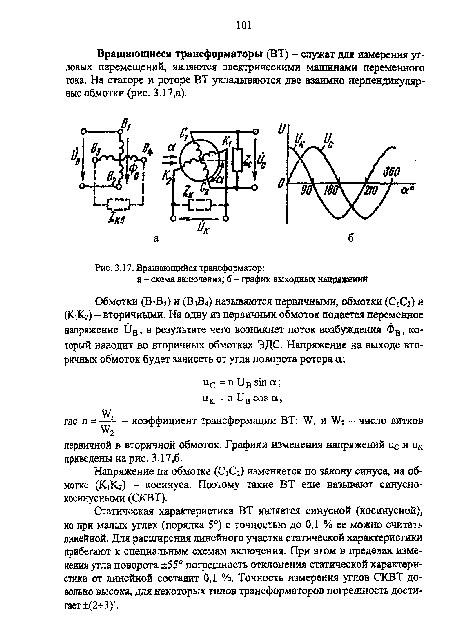
| Вращающийся трансформатор |
 |
Далее
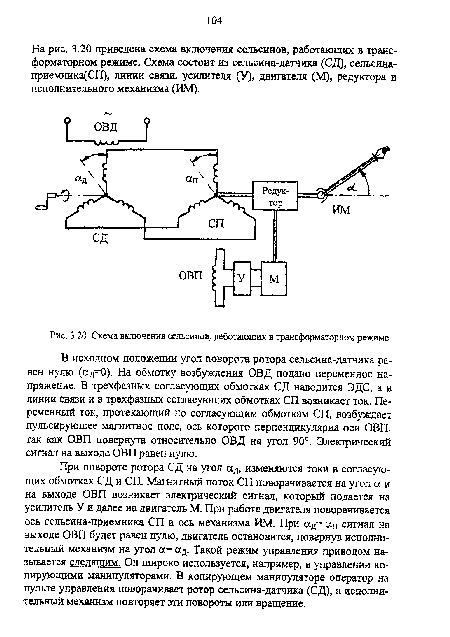
| Схема включения сельсинов, работающих в трансформаторном режиме |
 |
Далее
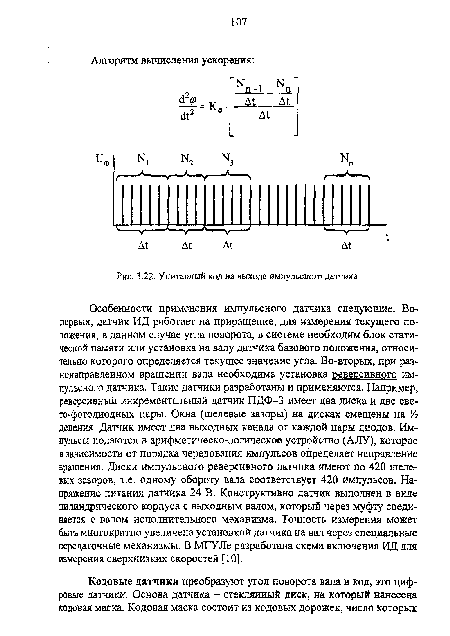
| Унитарный код на выходе импульсного датчика |
 |
Далее
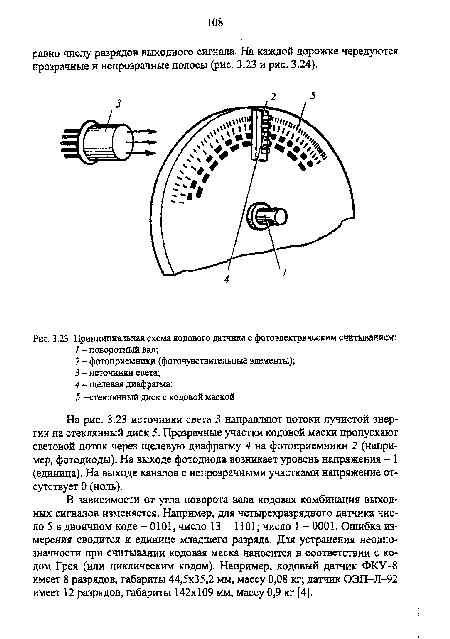
| Принципиальная схема кодового датчика с фотоэлектрическим считыванием |
 |
Далее
| Спиральный потенциометр |
 |
Далее
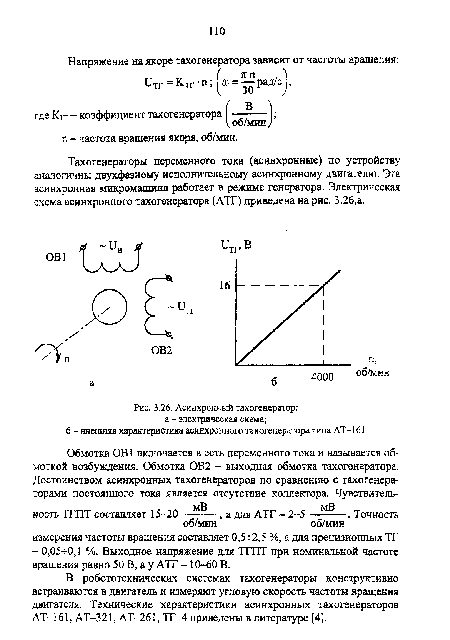
| Асинхронный тахогенератор |
 |
Далее
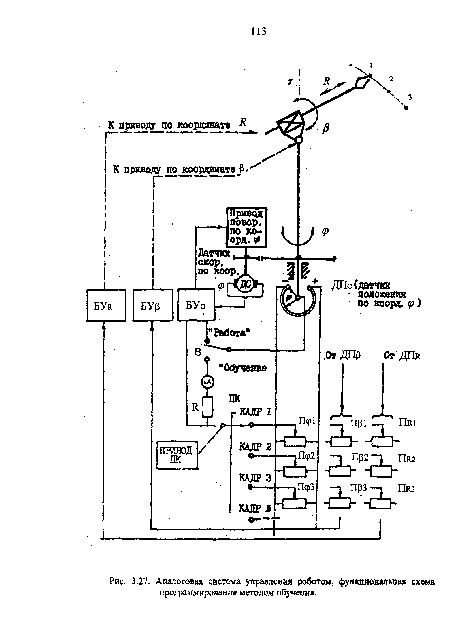
| Аналоговая система управления роботом, функциональная схема программирования методом обучения. |
 |
Далее
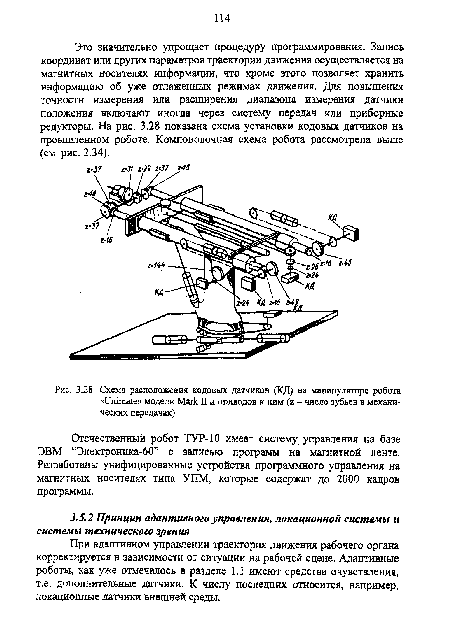
| Схема расположения кодовых датчиков (КД) на манипуляторе робота «Unimate» модели Mark II и приводов к ним (z - число зубьев в механических передачах) |
 |
Далее
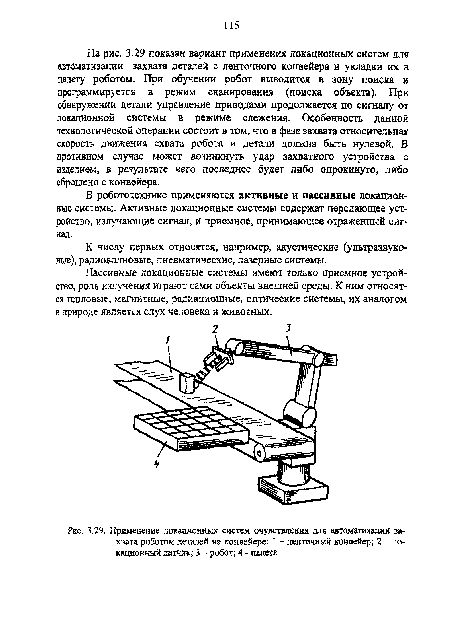
| Применение локационных систем очувствления для автоматизации захвата роботом деталей на конвейере |
 |
Далее
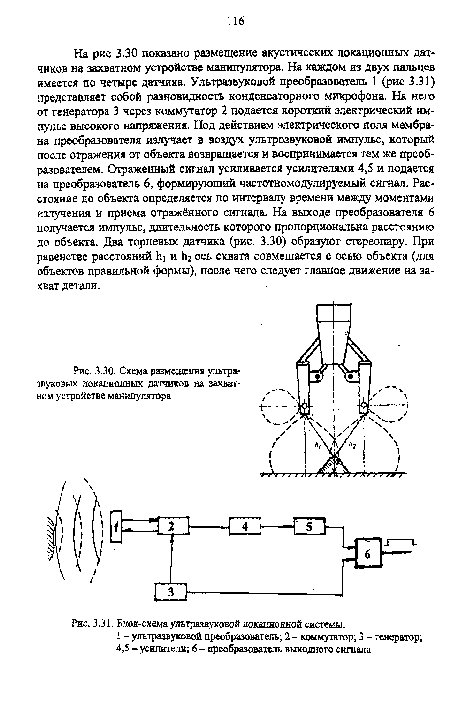
| Схема размещения ультразвуковых локационных датчиков на захватном устройстве манипулятора |
 |
Далее
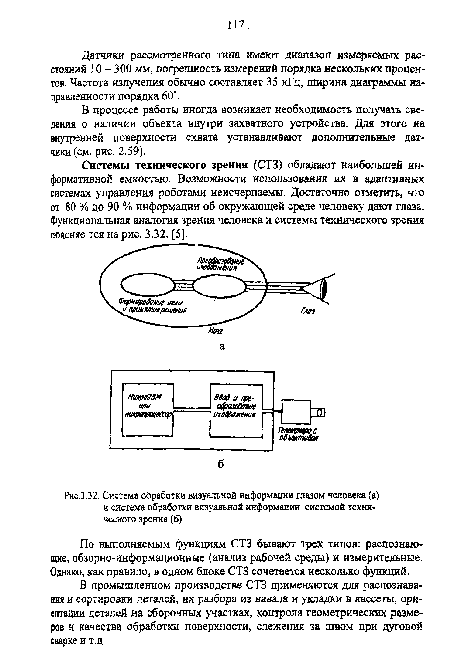
| Система обработки визуальной информации глазом человека (а) и система обработки визуальной информация системой технического зрения (б) |
 |
Далее
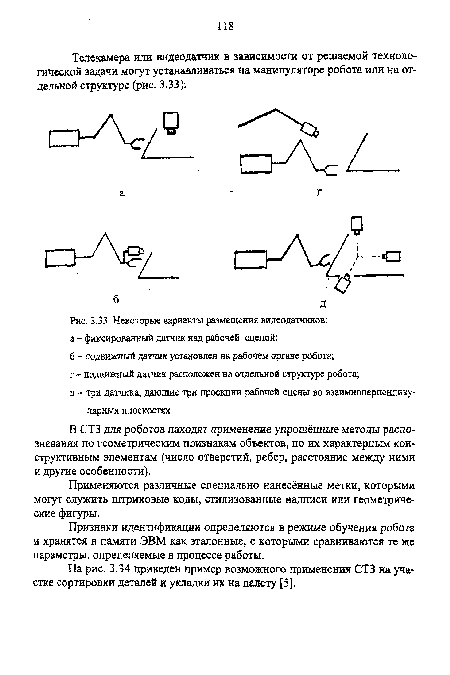
| Некоторые варианты размещения видеодатчиков |
 |
Далее
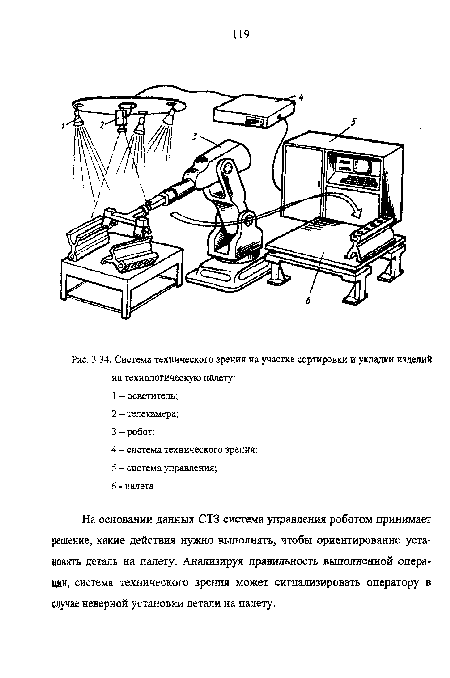
| Система технического зрения на участке сортировки и укладки изделий |
 |
Далее
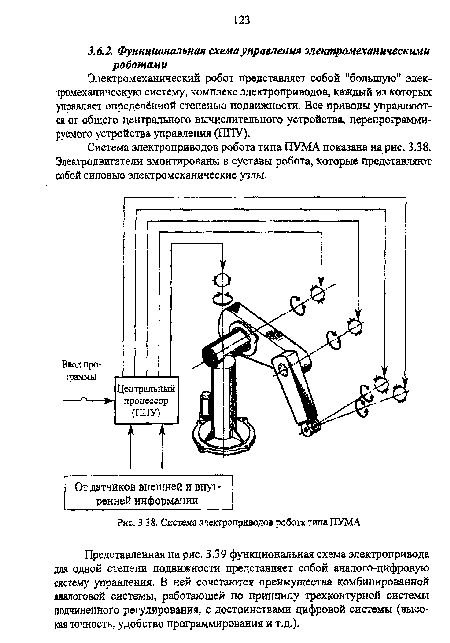
| Система электроприводов робога типа ПУМА |
 |
Далее
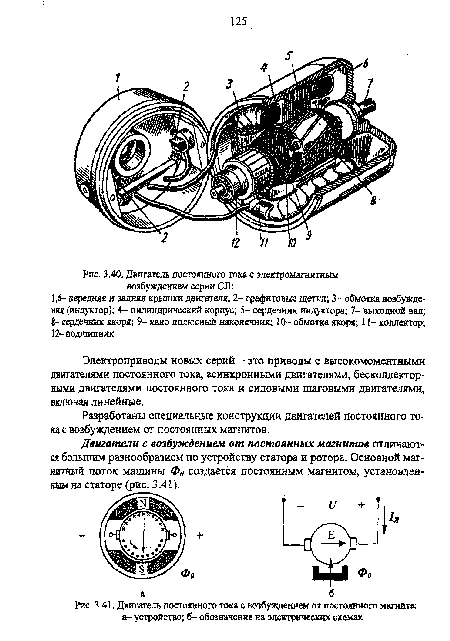
| Двигатель постоянного тока с электромагнитным возбуждением серии СЛ |
 |
Далее
| Двигатель постоянного тока с возбуждением от постоянного магнита |
|
Далее
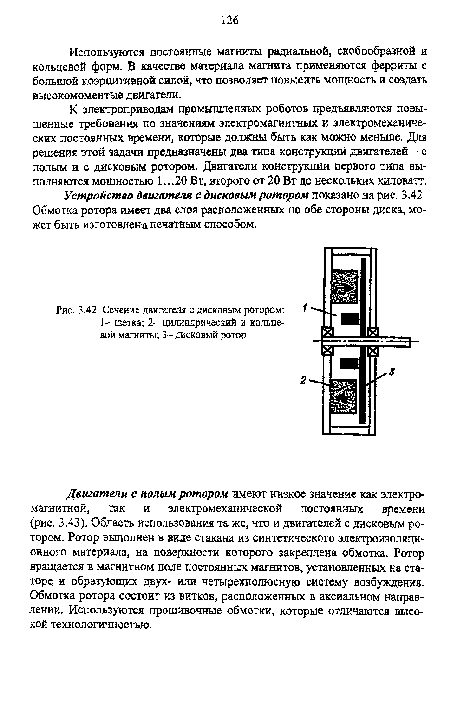
| Сечение двигателя с дисковым ротором |
 |
Далее
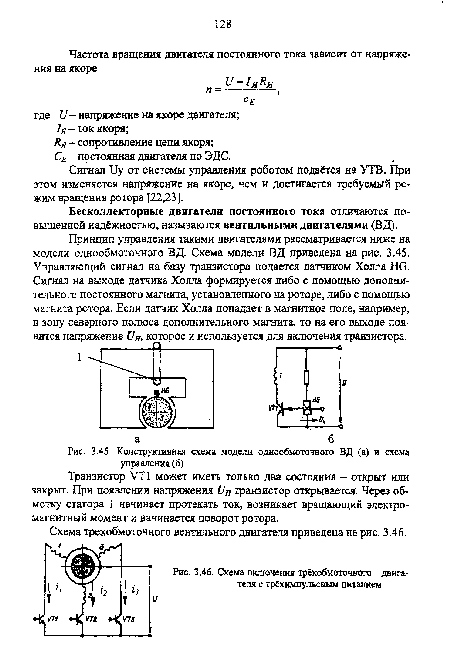
| Конструктивная схема модели однообмоточного ВД (а) и схема управления (6) |
 |
Далее
| Схема включения трёхобмоточного двигателя с трёхимпульскым питанием |
|
Далее
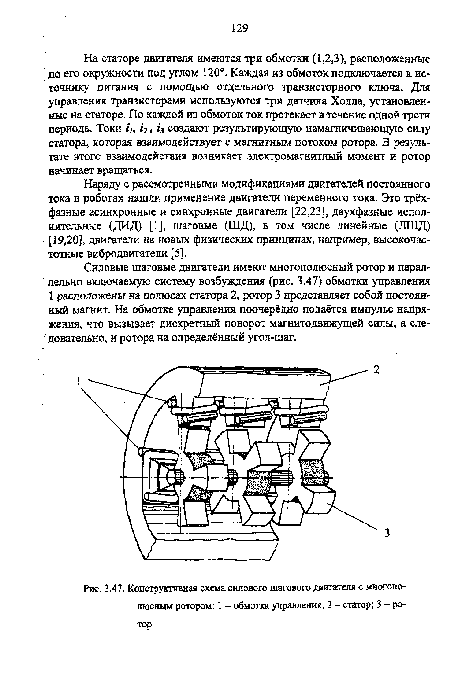
| Конструктивна» схема силового шагового двигателя с многополюсным ротором |
 |
Далее
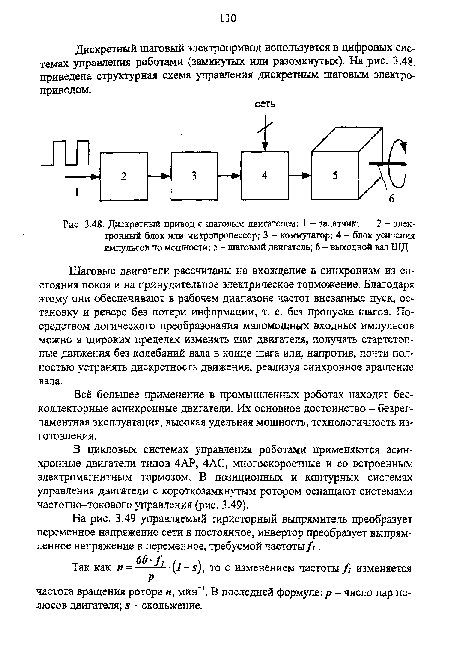
| Дискретный привод с шаговым двигателем |
 |
Далее
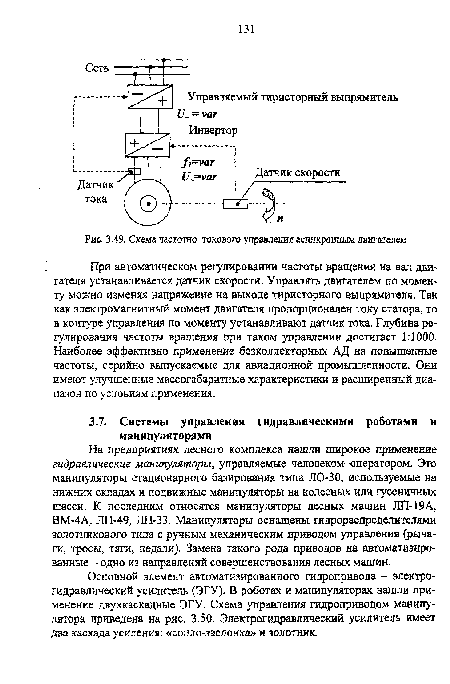
| Схема частотно-токового управления асинхронным двигателем |
 |
Далее
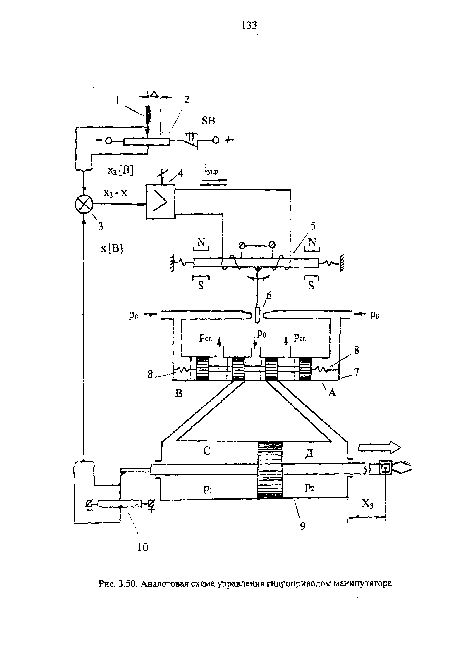
| Аналоговая схема управления гидроприводом манипулятора |
 |
Далее
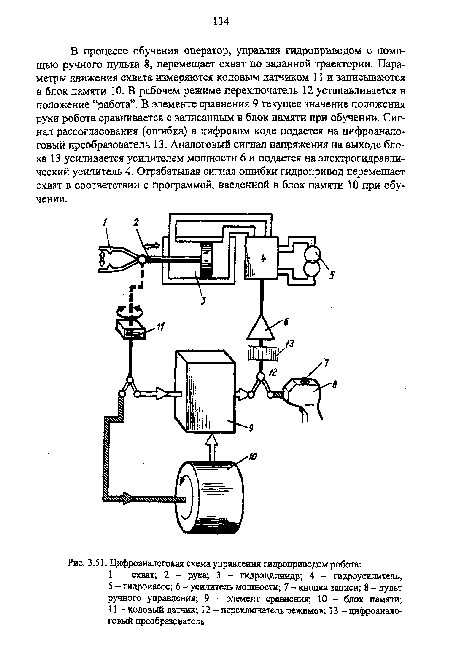
| Цифроаналоговая схема управления гидроприводом робота |
 |
Далее
| Обобщённая функциональная схема управления и программирования пневмощшювых роботов |
 |
Далее
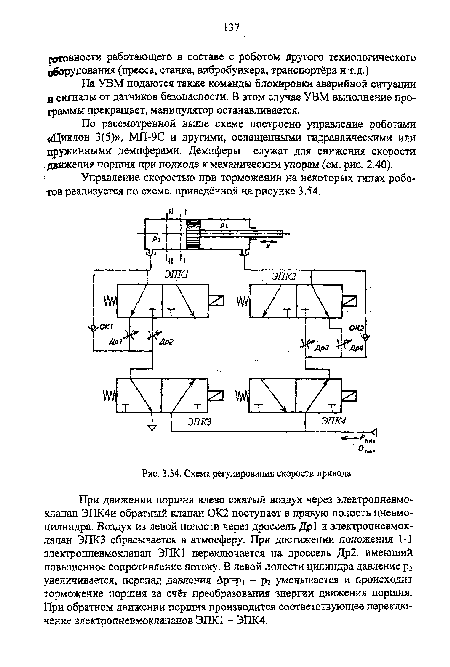
| Схема регулирования скорости привода |
 |
Далее
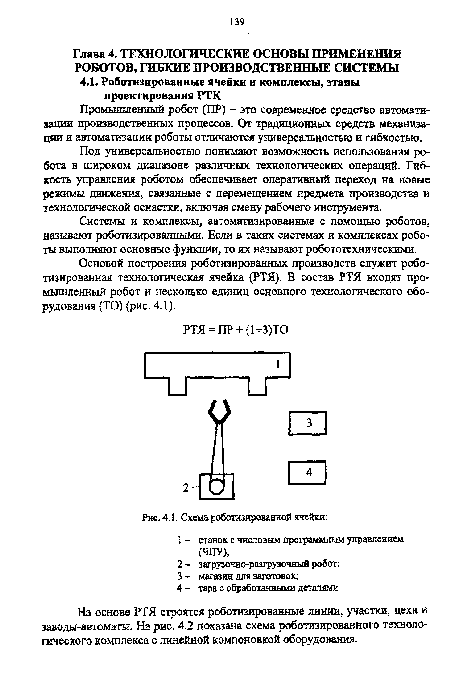
| Схема роботизированной ячейки |
 |
Далее
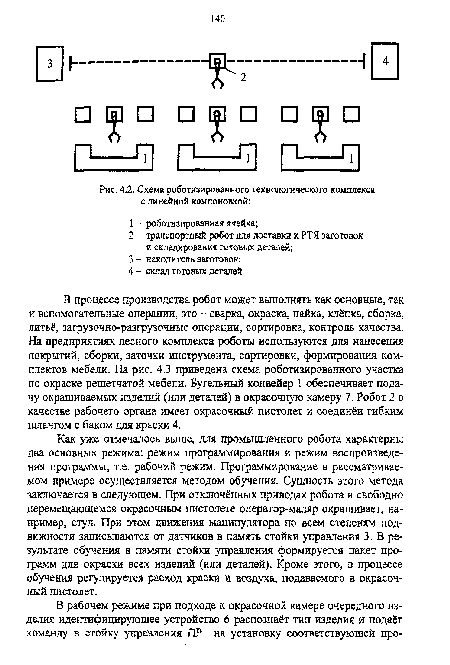
| Схема роботизированного технологического комплекса с линейной компоновкой |
 |
Далее
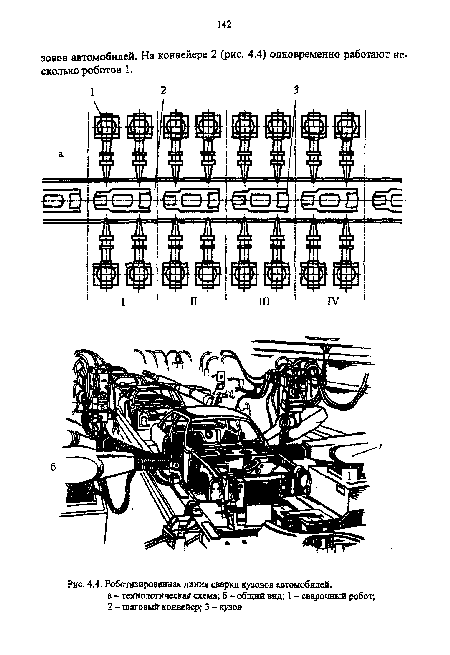
| Роботизированная линия сварки кузовов автомобилей |
 |
Далее
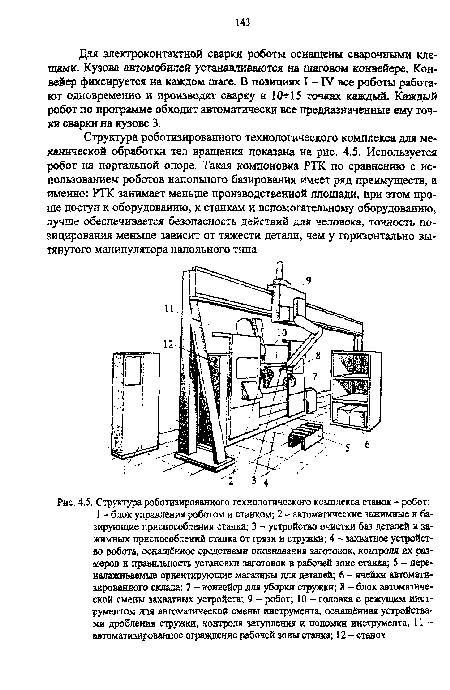
| Структура роботизированного технологического комплекса ставок - робот |
 |
Далее
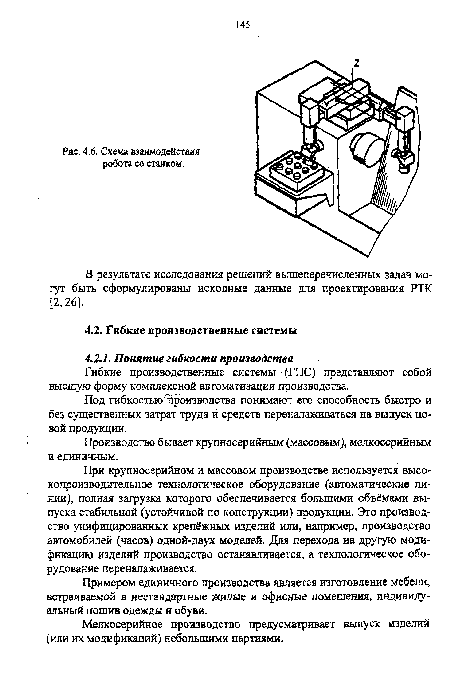
| Схема взаимодействия робота со станком. |
 |
Далее
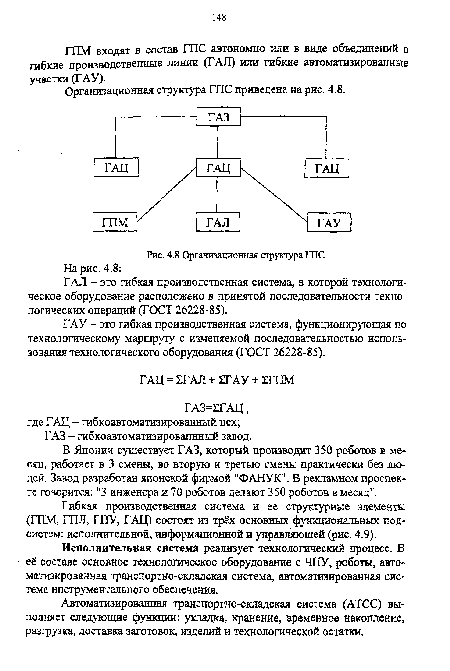
| Организационная структура ГПС |
 |
Далее
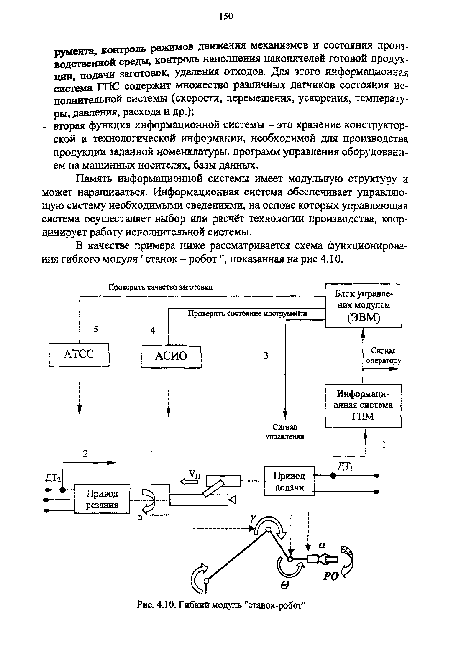
| Гибкий модуль "станок-робот” |
 |
Далее
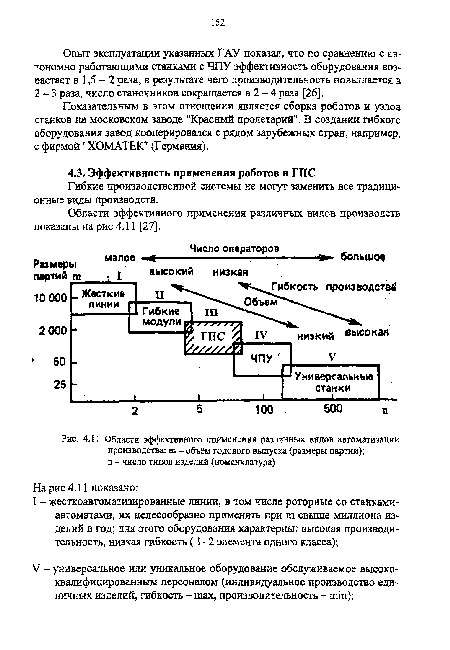
| Области эффективного применения различных видов автоматизации производства; m - объём годового выпуска (размеры партии); п - число типов изделий (номенклатура) |
 |
Далее
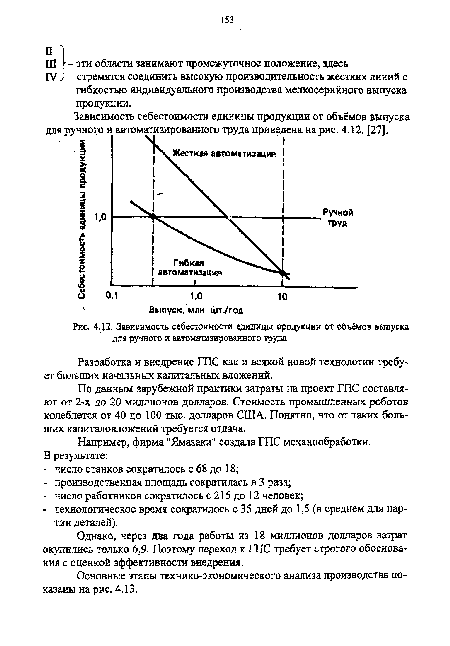
| Зависимость себестоимости единицы продукции от объёмов выпуска для ручного и автоматизированного труда |
 |
Далее
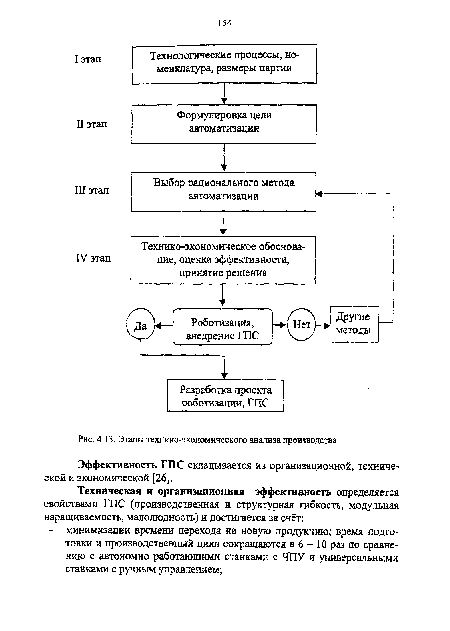
| Этапы технико-экономического анализа производства |
 |
Далее
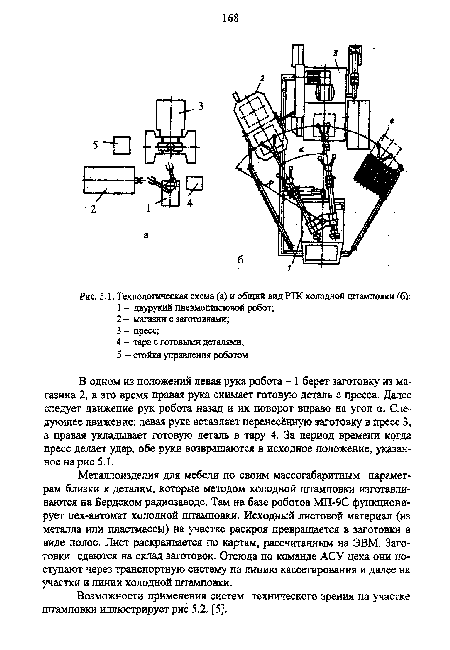
| Технологическая схема (а) и общий вид РТК холодной штамповки (б) |
 |
Далее
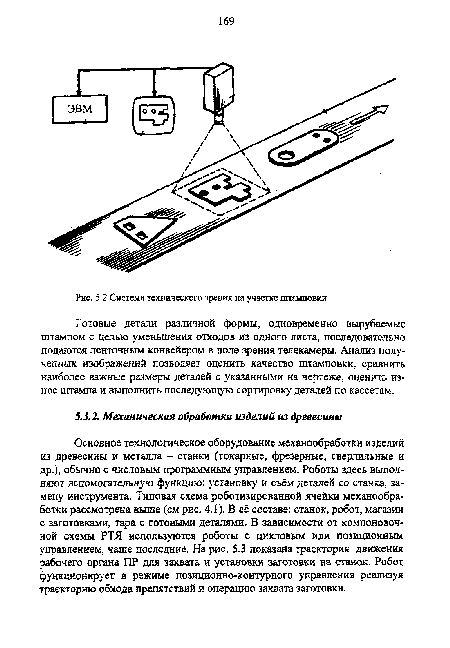
| Система технического зрения на участке штамповки |
 |
Далее
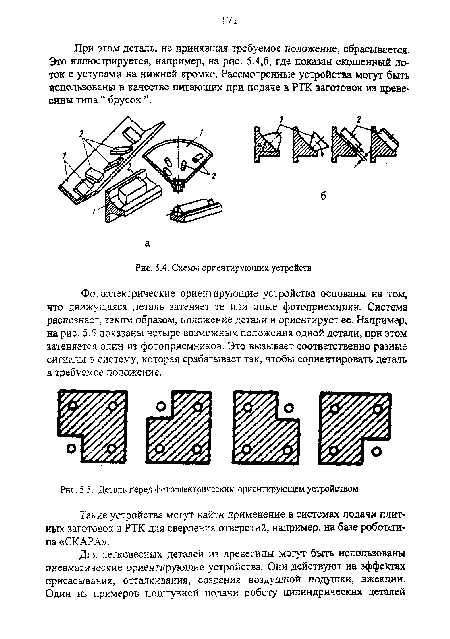
| Деталь перед фотоэлектрическим ориентирующем устройством |
 |
Далее
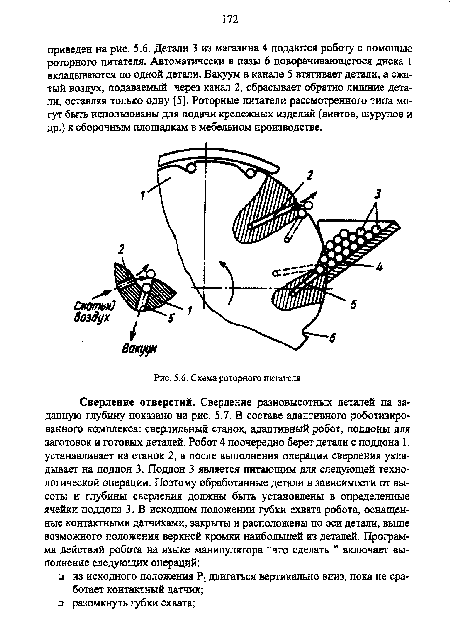
| Схема роторного питателя |
 |
Далее
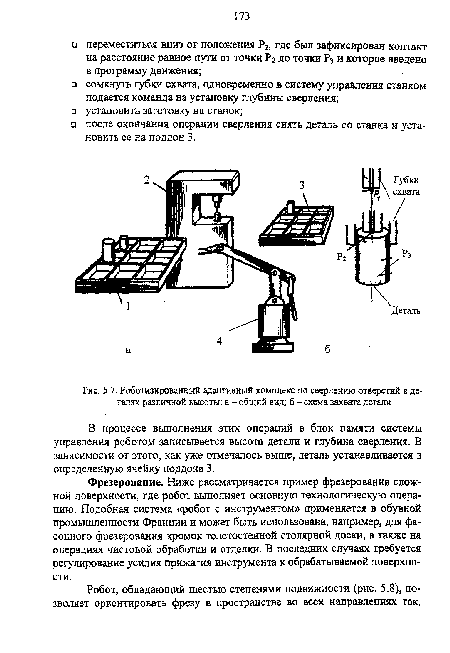
| Роботизированный адаптивный комплекс по сверлению отверстий в деталях различной высоты |
 |
Далее
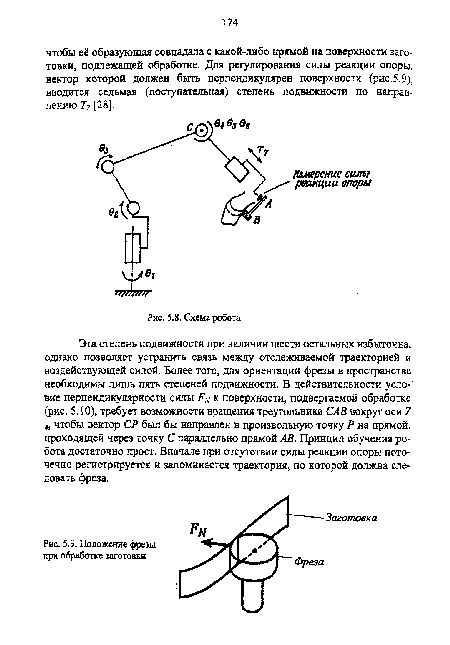
| Схема робота |
 |
Далее
| Положение фрезы при обработке заготовки |
|
Далее
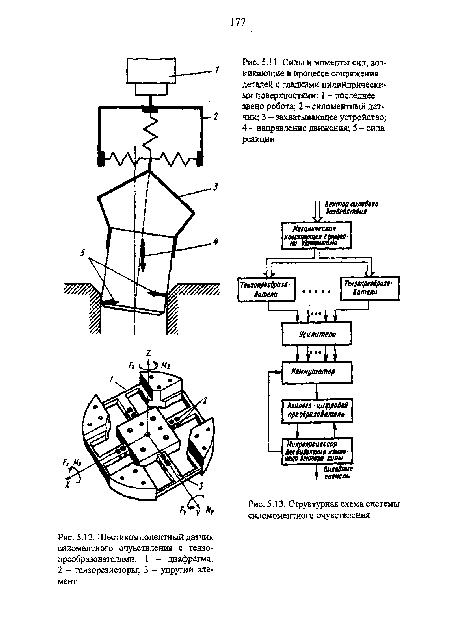
| Силы и моменты сил, возникающие в процессе сопряжения деталей с гладкими цилиндрическими поверхностями |
 |
Далее
| Структурная схема системы силомоментного очувствления |
|
Далее
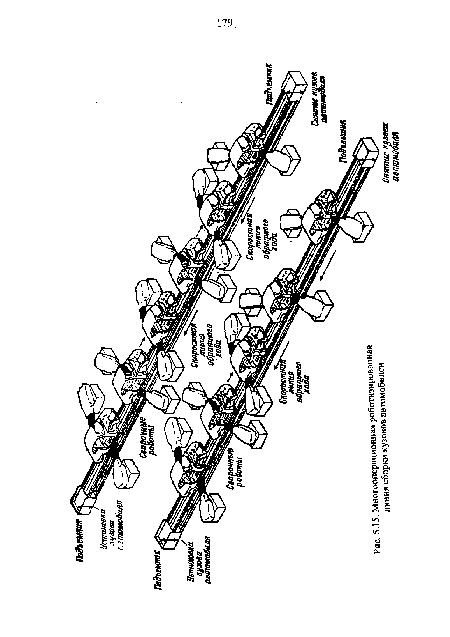
| Многооперанионная роботизированная линия сборки кузовов автомобилей |
 |
Далее
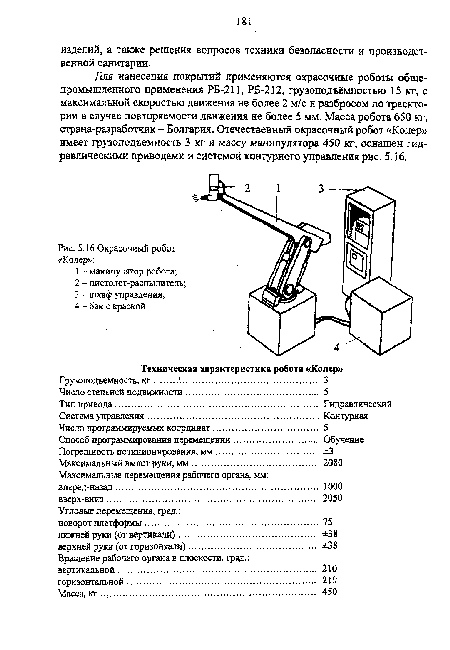
| Окрасочный робот «Колер» |
 |
Далее
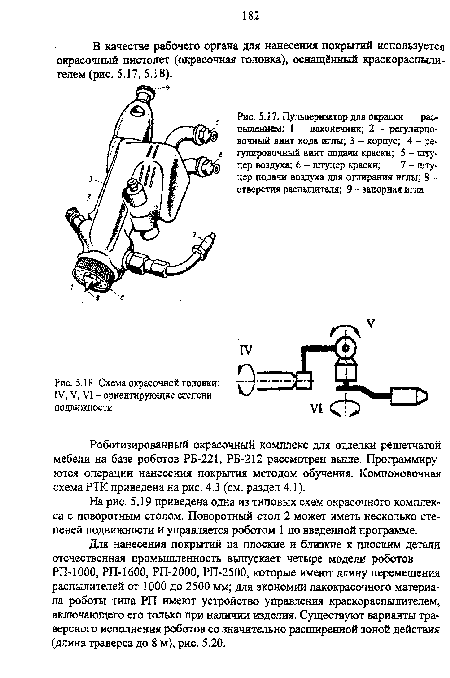
| Пульверизатор для окраски распылением |
 |
Далее
| Схема окрасочной головки |
|
Далее
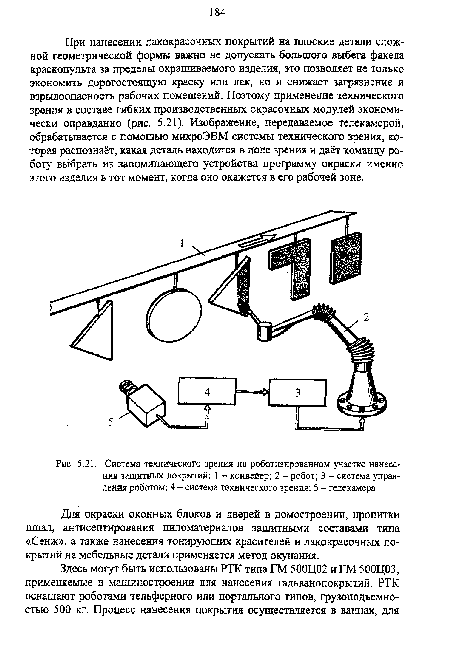
| Система технического зрения на роботизированном участке нанесения защитных покрытий |
 |
Далее
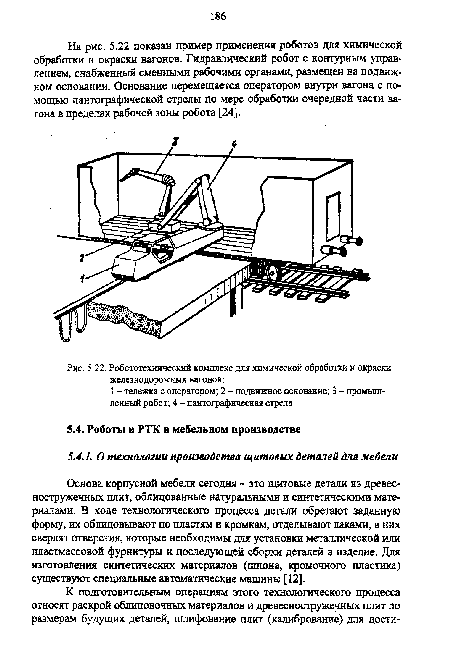
| Роботохехнический комплекс для химической обработки и окраски железнодорожных вагонов |
 |
Далее
| Линия для облицовывания |
 |
Далее
| Линия для обработки и облицовывания кромок щитовых деталей мебели |
|
Далее
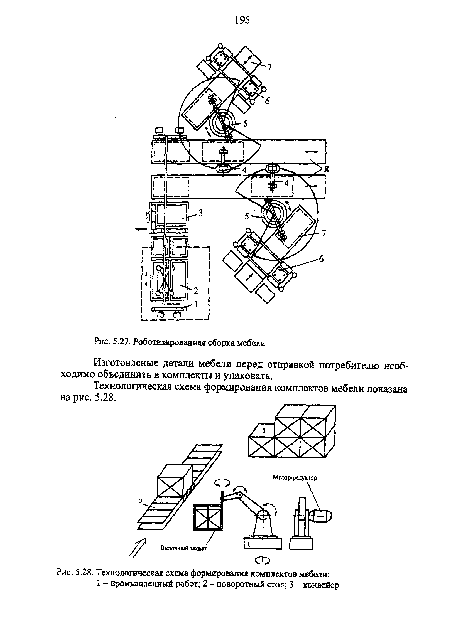
| Технологическая схема формирования комплектов мебели |
 |
Далее
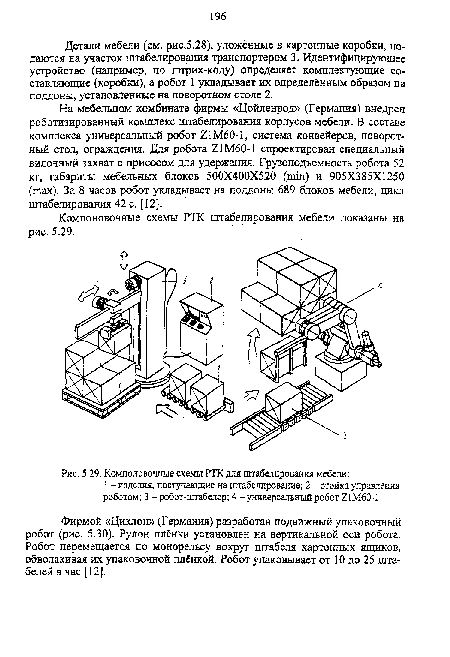
| Компоновочные схемы РТК для штабелирования мебели |
 |
Далее
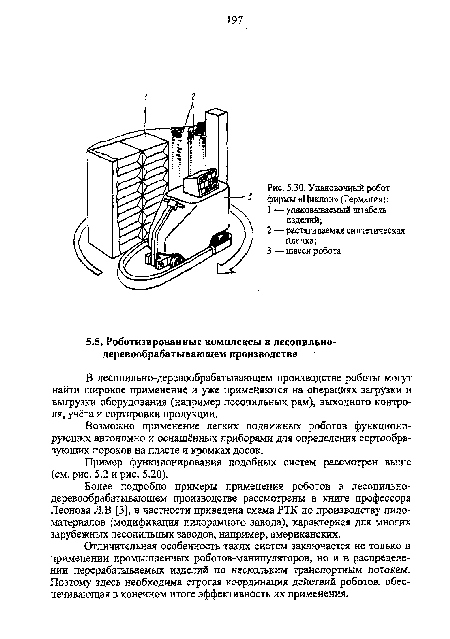
| Упаковочный робот фирмы «Циклон» (Германия) |
 |
Далее
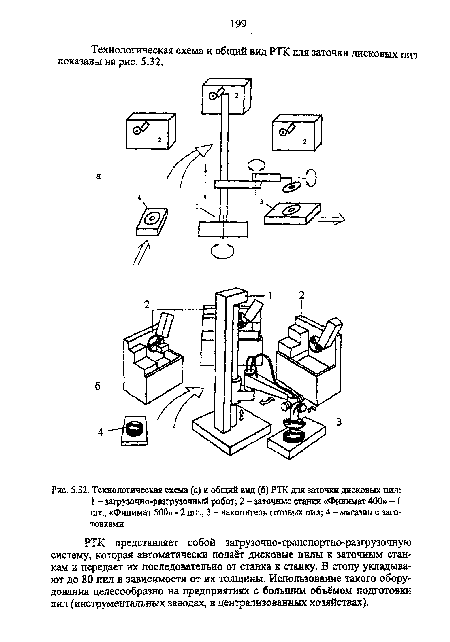
| Технологическая схема (а) и общий вид (б) РТК для заточки дисковых пил |
 |
Далее
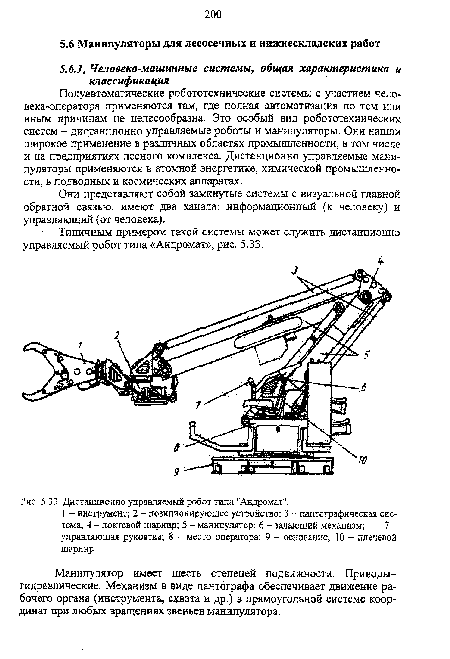
| Дистанционно управляемый робот типа "Андромат" |
 |
Далее
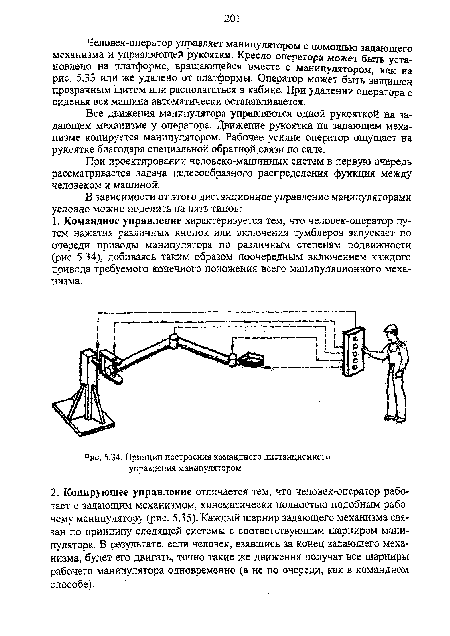
| Принцип построения командного дистанционного управления манипулятором |
 |
Далее
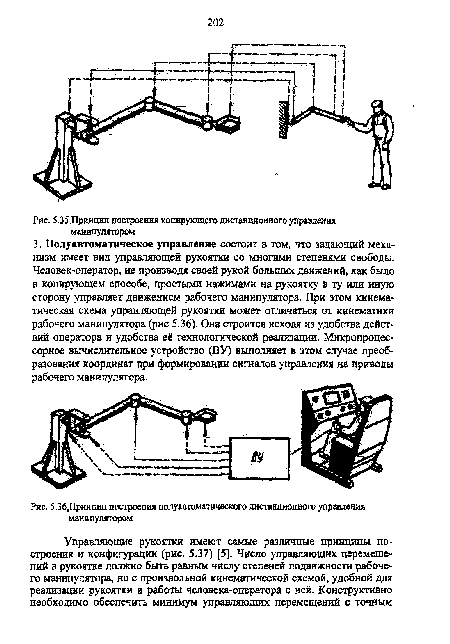
| Принцип построения копирующего дистанционного управления манипулятором |
 |
Далее
| Принцип построения полуавтоматического дистанционного управления манипулятором |
|
Далее
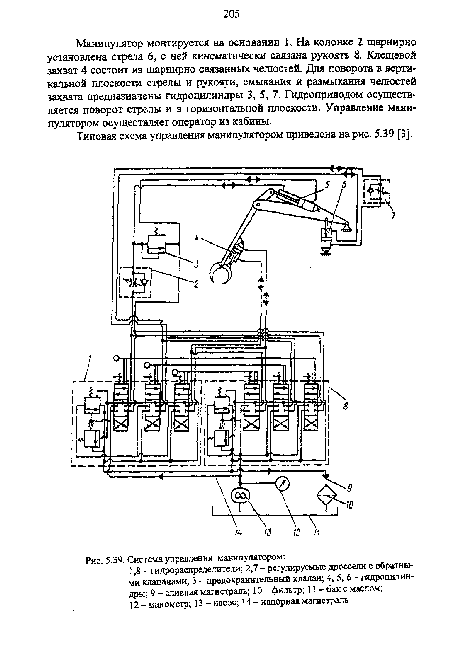
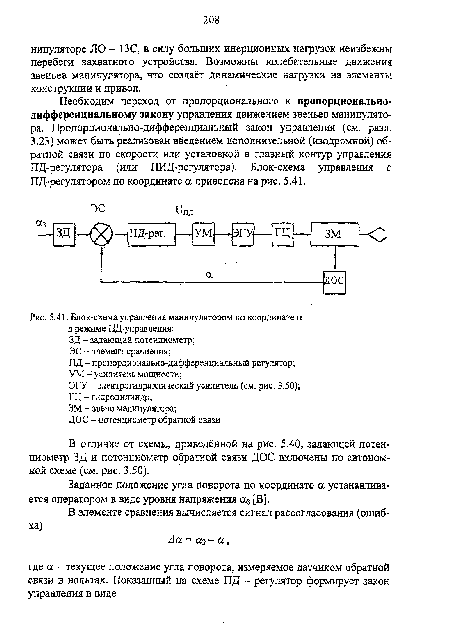
| Система управления манипулятором |
 |
Далее
| Функциональная схема копирующего управления |
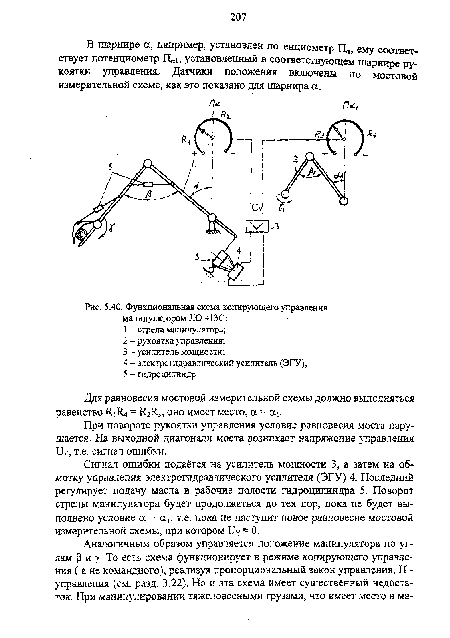 |
Далее
| Блок-схема управления манипулятором по координате а |
 |
Далее
| Функциональна схема гидропривода объёмного управления |
 |
Далее
| Грейферные захваты |
 |
Далее
| Челюстной захват лесопогрузчика |
 |
Далее
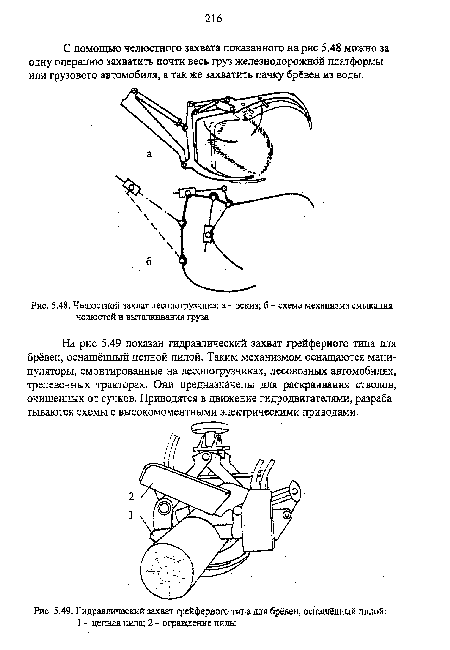
| Гидравлический захват грейферного типа для брёвен, оснащённый пилой |
|
Далее
| Основные элементы цикла работы машины ЛП-49 |
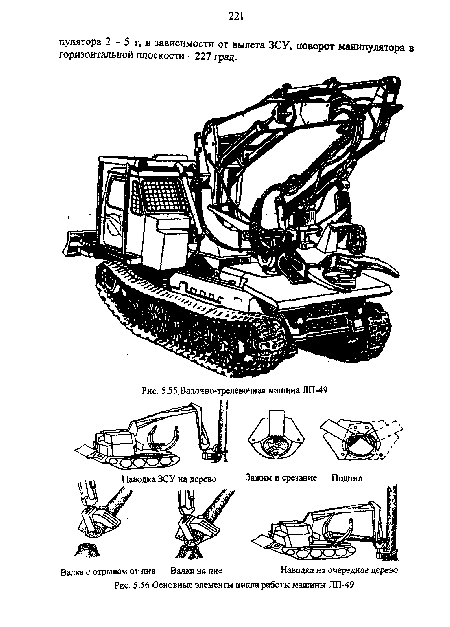 |
Далее
| Харвестер «CATERPILLAR» (США) |
 |
Далее
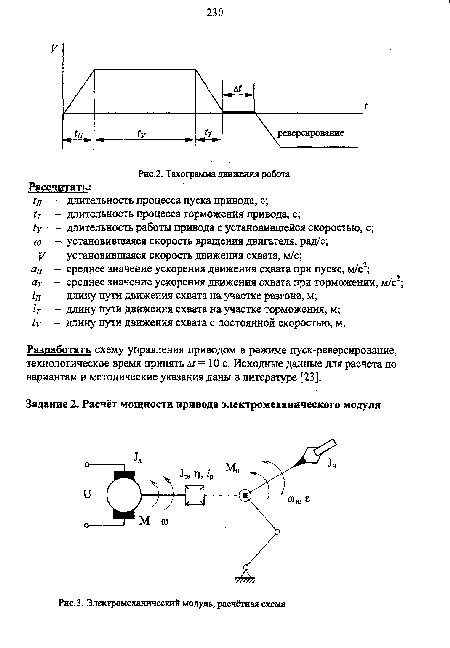
| Тахо грамма движения робота |
 |
Далее
| З. Электромеханический модуль, расчётная схема |
|
Далее
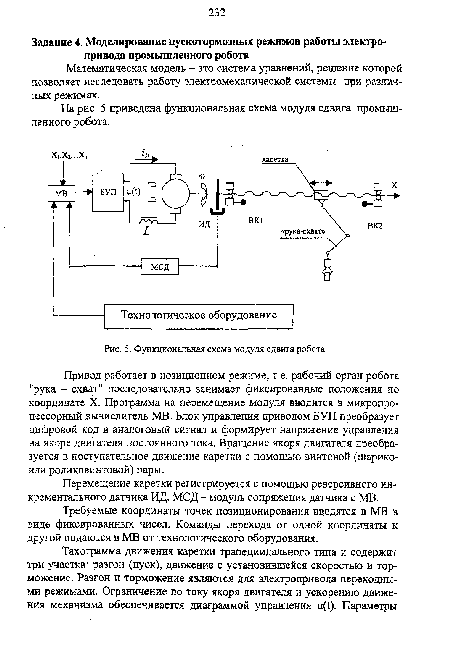
| Функциональная схема модуля сдвига робота |
 |
Далее
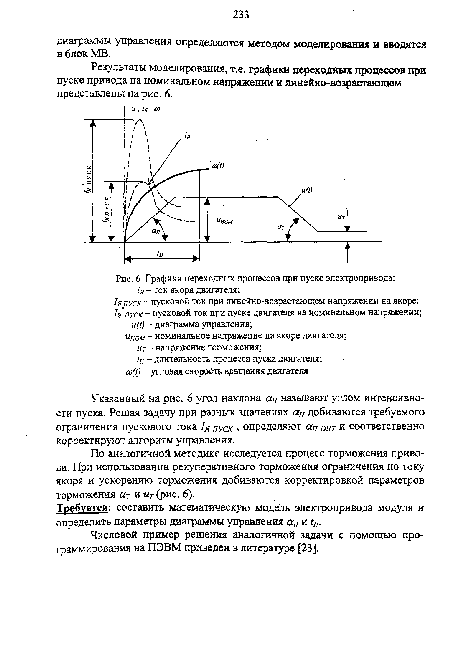
| Графики переходных процессов при пуске электропривода |
 |
Далее
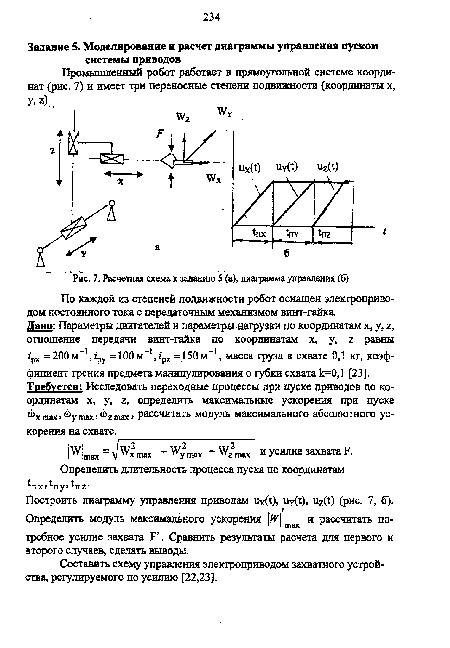
| Расчетная схема к заданию 5 (а), диаграмма управления (б) |
 |
Далее