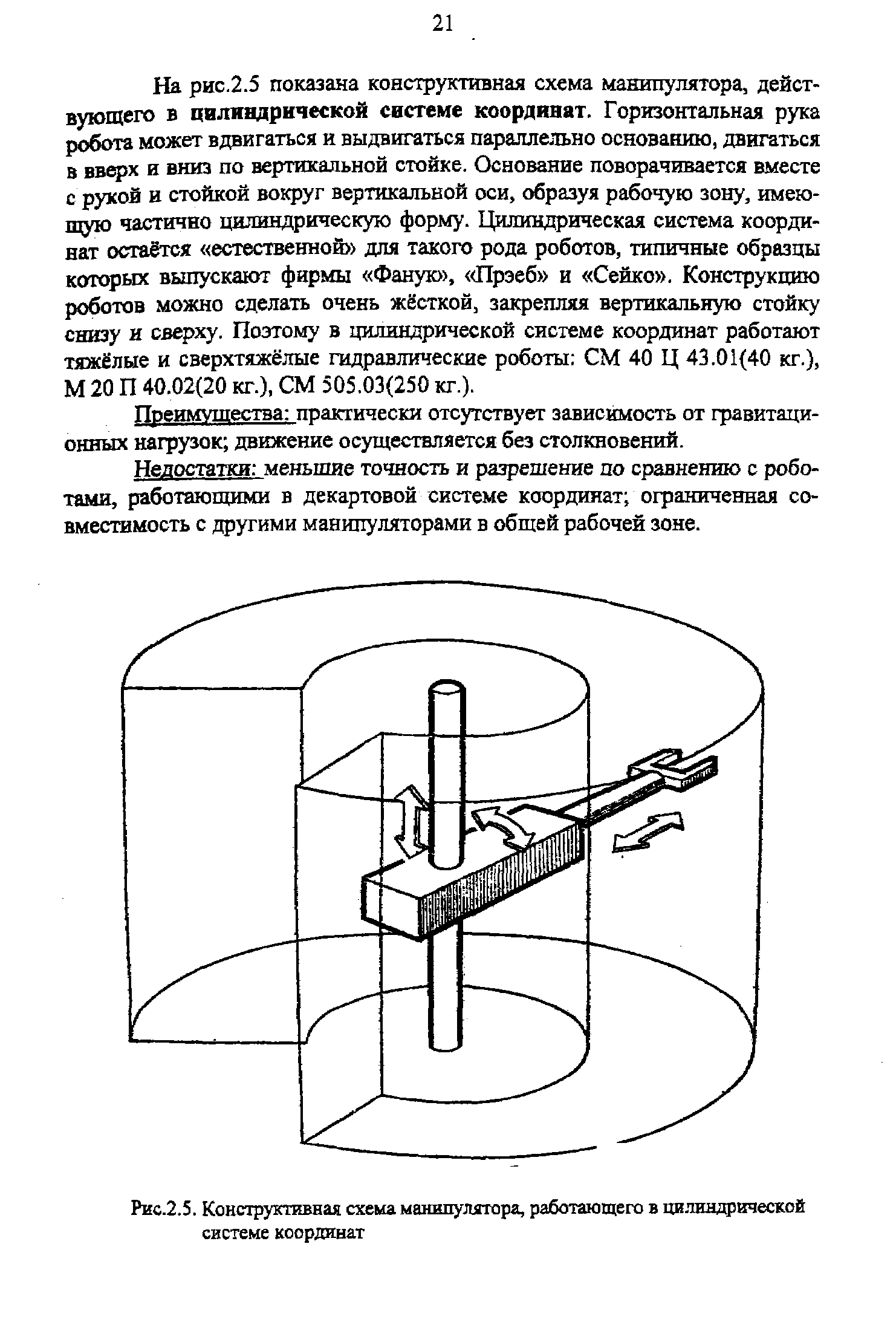
На рис.2.5 показана конструктивная схема манипулятора, действующего в цилиндрической системе координат. Горизонтальная рука робота может вдвигаться и выдвигаться параллельно основанию, двигаться в вверх и вниз по вертикальной стойке. Основание поворачивается вместе с рукой и стойкой вокруг вертикальной оси, образуя рабочую зону, имеющую частично цилиндрическую форму. Цилиндрическая система координат остаётся «естественной» для такого рода роботов, типичные образцы которых выпускают фирмы «Фанук», «Прэеб» и «Сейко». Конструкцию роботов можно сделать очень жёсткой, закрепляя вертикальную стойку снизу и сверху. Поэтому в цилиндрической системе координат работают тяжёлые и сверхтяжёлые гидравлические роботы: СМ 40 Ц 43.01(40 кг.), М 20 П 40.02(20 кг.), СМ 505.03(250 кг.).
Вернуться к оглавлению