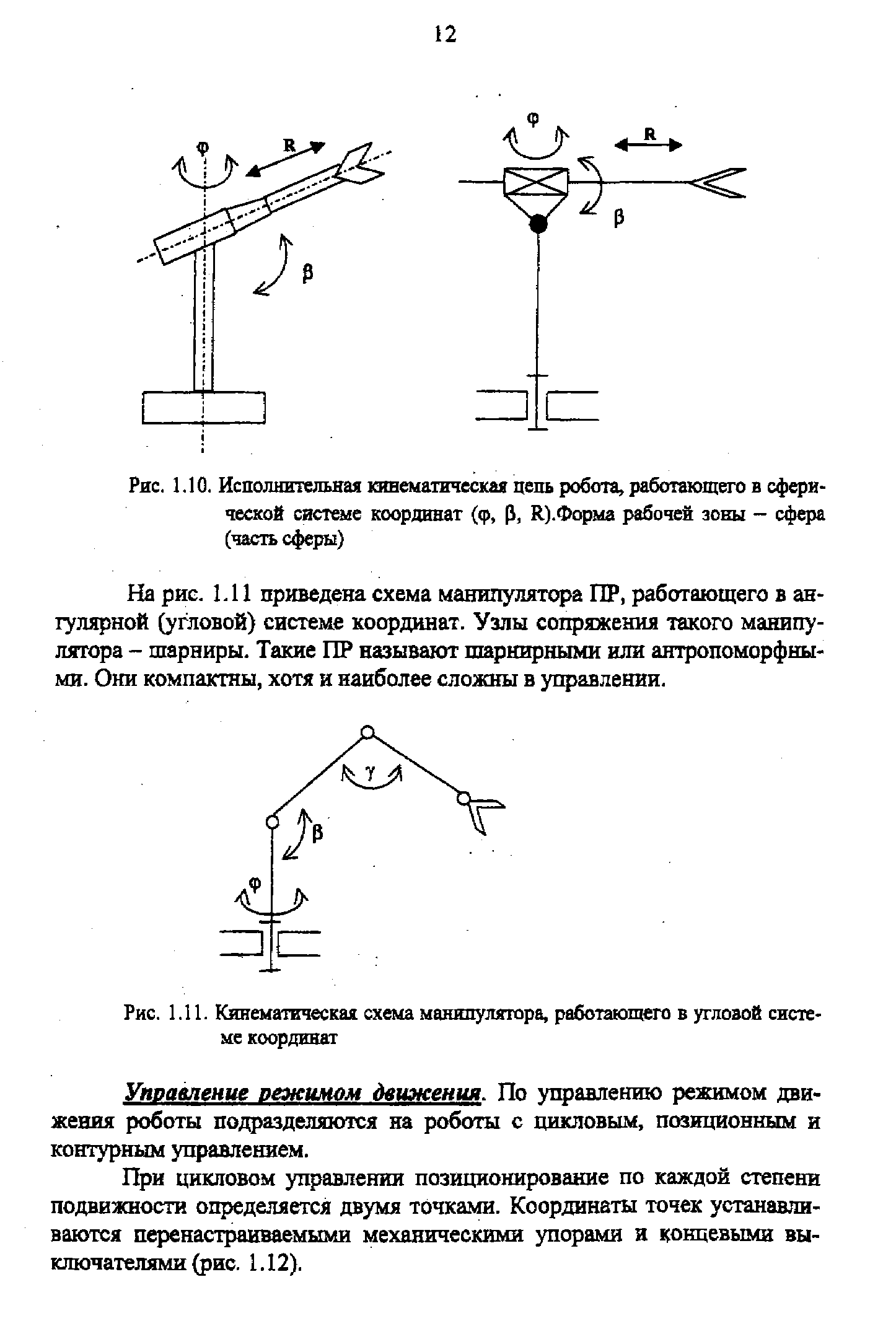
На рис. 1.11 приведена схема манипулятора ПР, работающего в ан-гулярной (угловой) системе координат. Узлы сопряжения такого манипулятора - шарниры. Такие ПР называют шарнирными или антропоморфными. Они компактны, хотя и наиболее сложны в управлении.
Вернуться к оглавлению