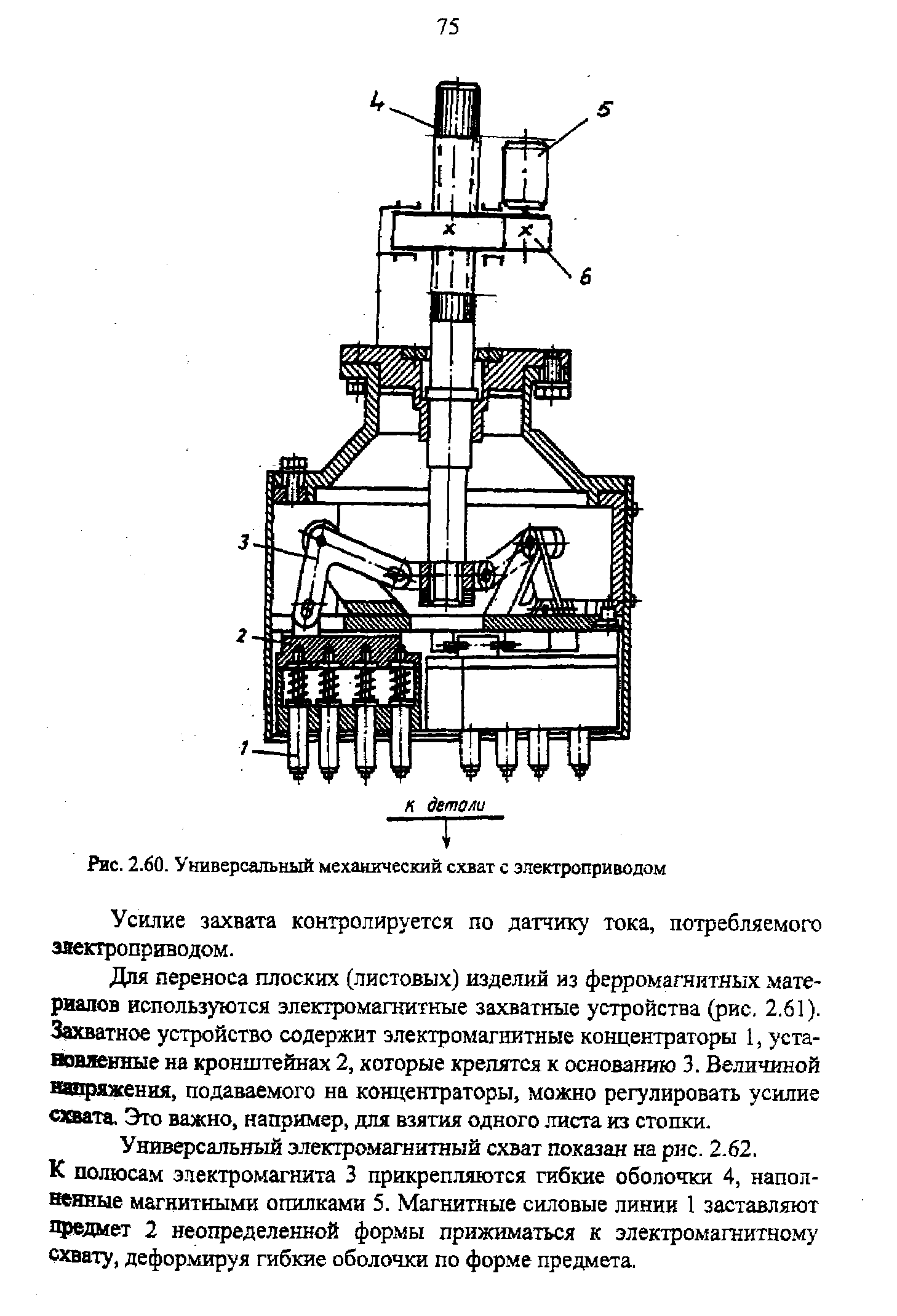
Схема устройства универсального механического схвата с электроприводом приведена на рис. 2.60. Захватное устройство содержит набор подпружиненных пальцев 1, установленных на губках 2. При нажатии на предмет, подлежащий захвату, часть упирающихся в него пальцев отжимается вверх. Все остальные пальцы, вне конфигурации предмета, остаются в прежнем положении. При включении электродвигателя 5 движение через редуктор 6 и механизм "винт-гайка" передается на шток 4, который перемещается вверх. Рычаг 3 поворачивается, губки 2 сходятся, зажимая оставшимися пальцами со всех сторон предмет. Таким образом, можно брать и нестрого ориентированные предметы. Надежность захвата предметов сложной конфигурации зависит от плотности размещения пальцев.~~Контроль по усилию с большей или меньшей точностью требуется при многих сборочных операциях. Достаточно точно управлять усилием можно по току, потребляемому двигателем в электромеханических роботах. Датчики тока устанавливают в цепях приборов, устройств для закручивания шурупов, в электромеханических схватах (см. рис. 2.60).
Вернуться к оглавлению