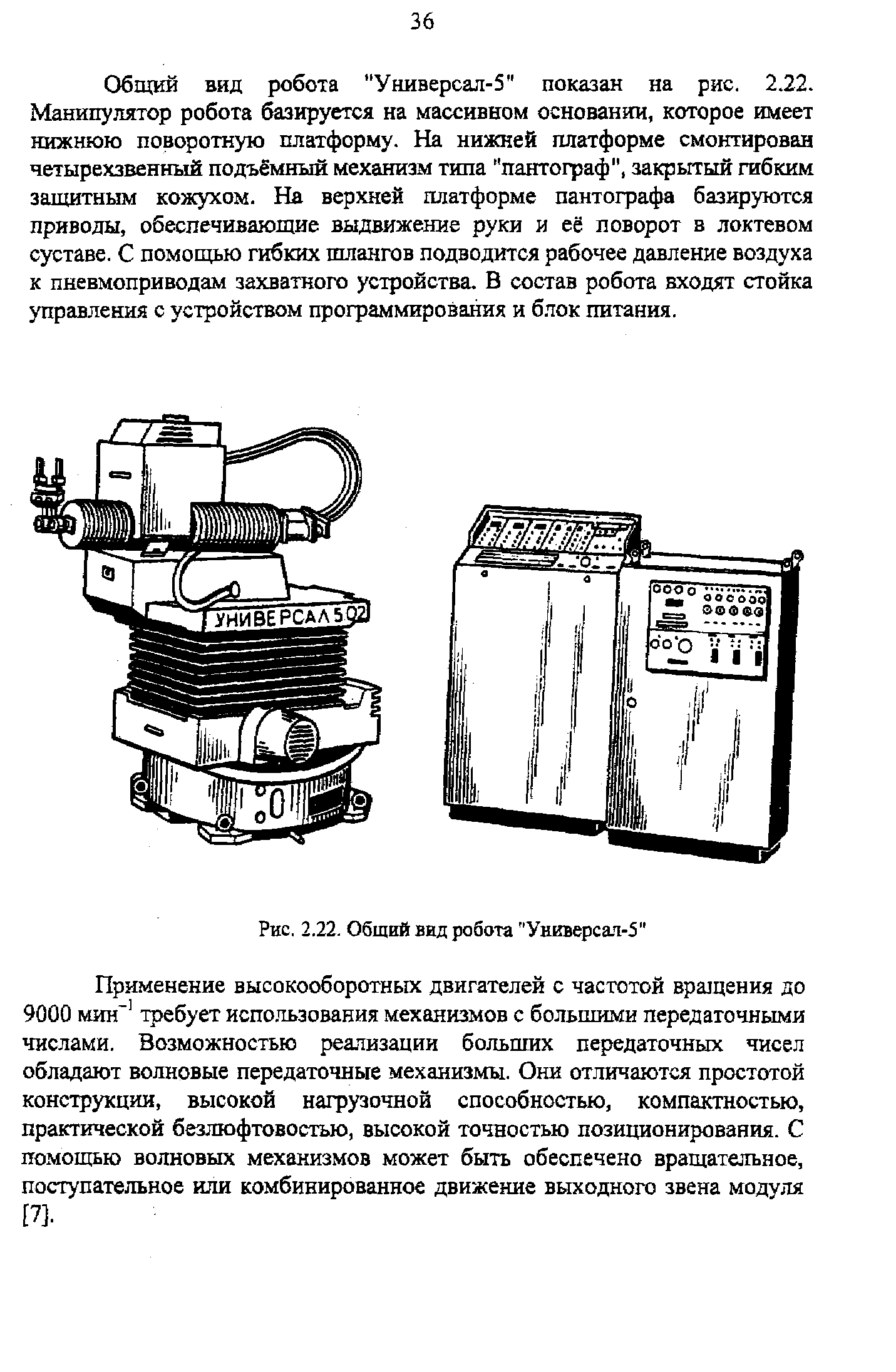
Общий вид робота "Универсал-5" показан на рис. 2.22. Манипулятор робота базируется на массивном основании, которое имеет нижнюю поворотную платформу. На нижней платформе смонтирован четырехзвенный подъёмный механизм типа "пантограф", закрытый гибким защитным кожухом. На верхней платформе пантографа базируются приводы, обеспечивающие выдвижение руки и её поворот в локтевом суставе. С помощью гибких шлангов подводится рабочее давление воздуха к пневмоприводам захватного устройства. В состав робота входят стойка управления с устройством программирования и блок питания.
Вернуться к оглавлению