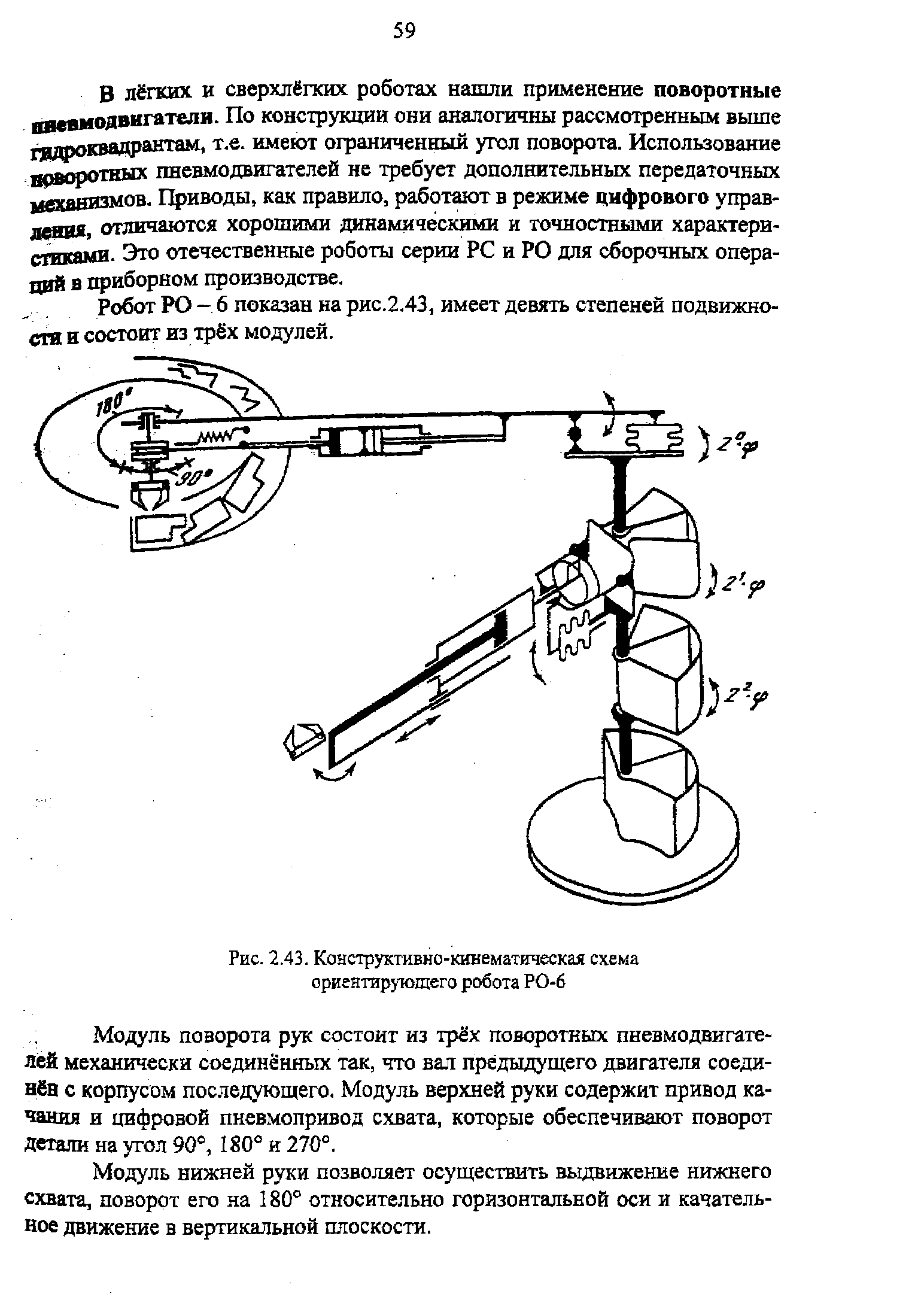
Робот РО — 6 показан на рис.2.43, имеет девять степеней подвижности и состоит из трёх модулей.~~К числу последних относится робот РО-6 с цифровым пневмоприводом. Конструкция робота РО-6 рассмотрена выше, в разделе 2.2.4 (см. рис. 2.43).
Вернуться к оглавлению