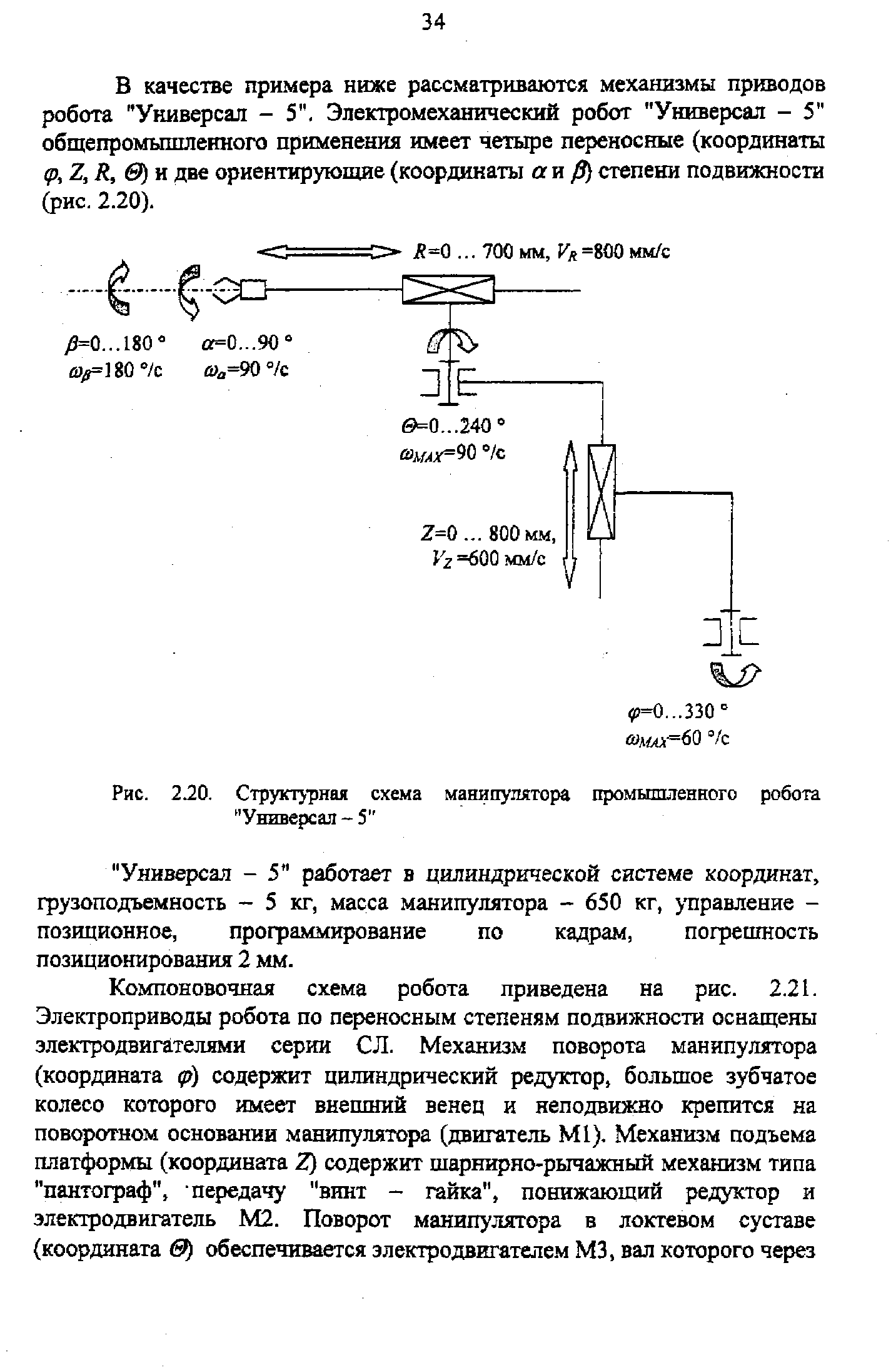
В качестве примера ниже рассматриваются механизмы приводов робота "Универсал - 5". Электромеханический робот "Универсал - 5" общепромышленного применения имеет четыре переносные (координаты <р, 2, Л, @) и две ориентирующие (координаты а и /3) степени подвижности (рис. 2.20).
Вернуться к оглавлению