Перейдем к исследованию динамики системы ’’хшцник—жертва” с трофической функцией достаточно общего вида (допускающей как равновесные точки, так и предельные циклы) в случайной среде.[ ...]
Условие (1г/(1т = 0 определяет амплитуду предельных циклов г 2 .[ ...]
Таким образом, вид трофической функции V задает соотношение между производными ¡p , ф” , ¡р , которое в свою очередь, определяет знаки А, В, С, D и тем самым поведение системы в окрестности равновесия.[ ...]
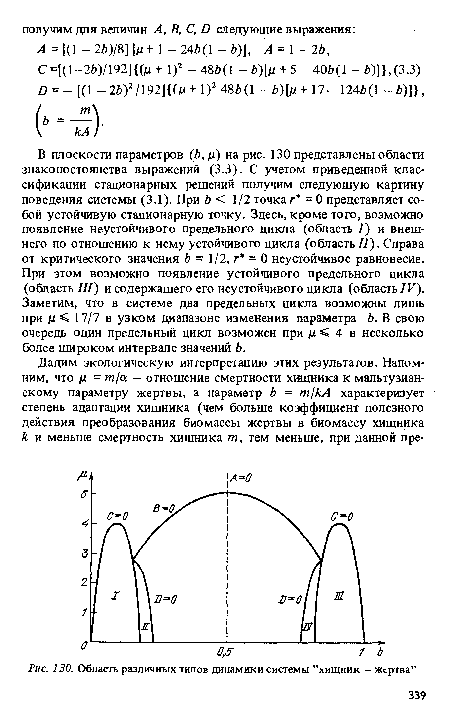
Рассмотрим теперь, как меняется динамика системы с ростом приспособленности хищника, т.е. с убыванием Ъ от 1 до 0. Если приспособленность достаточно низкая, то предельные циклы отсутствуют, а равновесие является неустойчивым. С ростом приспособленности в окрестности этого равновесия возможно появление устойчивого цикла и далее внешнего неустойчивого. В зависимости от начальных условий (соотношения биомассы хищника и жертвы) система может либо терять устойчивость, т.е. уходить из окрестности равновесия, либо в ней будут со временем устанавливаться устойчивые колебания. Дальнейший рост приспособленности делает невозможным колебательный характер поведения системы. Однако при Ъ < 1/2 равновесие становится устойчивым, и далее могут возникать сначала два предельных цикла (неустойчивый внутри устойчивого), а затем устойчивый цикл пропадает и с ростом Ь пропадает и неустойчивый цикл.[ ...]
Таким образом, при хорошей адаптации хищника в окрестности устойчивого равновесия могут возникать неустойчивый и устойчивый циклы, т.е. в зависимости от начальных условий система ’’хищник—жертва” либо стремится к равновесию, либо, колеблясь, уходит от него, либо в окрестности равновесия устанавливаются устойчивые колебания численностей обоих видов.[ ...]
Рисунки к данной главе:
| Область различных типов динамики системы ’’хищник — жертва” |
 |