Вопросу предварительного выбора типа регулирующего устройства следует уделять большое внимание. Если выбор общей структуры системы регулирования в какой-то мере определяется опытом и технической интуицией конструктора, то использование в этой системе того или иного типа регулятора должно обусловливаться конкретными данными, характеризующими автоматизируемый технологический процесс. При этом следует учитывать, что применение неоправданно сложного, высокодинамичного регулятора удорожает систему регулирования, затрудняет ее обслуживание и понижает надежность, а применение оегулятора с недостаточными динамическими возможностями не обеспечивает правильного проведения процесса и при определенных условиях может вывести систему из рабочего состояния.[ ...]
Расчет параметров настройки регулятора может производиться различными способами. Так же как и вопросу исследования условий устойчивости систем автоматического регулирования решению этих задач посвящено много специальных работ [9, 10, 12]. Здесь мы ограничимся приведением простейшей методики расчета параметров настройки регулятора, разработанной во Всесоюзном теплотехническом институте. Исходными данными этого расчета служат три параметра объекта регулирования: т, р, е, значения которых определяются по кривым разгона. Произведение этих величин ерт является общей характеристикой объекта. В зависимости от его значения выбираются те или иные расчетные формулы.[ ...]
Часто настройку П-регулятора характеризуют не степенью обратной связи, а коэффициентом передачи регулятора который связан с 6 зависимостью (П1.9).[ ...]
Приведенные формулы расчета настройки регуляторов составлены для получения переходного процесса со степенью затухания Чг=0,75.[ ...]
Расчет оптимальной настройки регулятора с использованием динамического коэффициента регулирования можно .производить, например, методом, изложенным в литературе [12].[ ...]
Таким образом, проверка устойчивости системы сводится к определению точки пересечения годографа вектора этой характеристики с отрицательной вещественной полуосью комплексной плоскости.[ ...]
Рассмотрим построение области устойчивости системы регулирования объекта, изображенного на рис. 111.8. Амплитуднофазовая характеристика этого объекта пересекает вещественную полуось в точке с координатой —0,087 (см. рис. ШЛО). Подключение к объекту П-регулятора увеличивает длину вектора в раз (Ар—коэффициент передачи регулятора). Вследствие этого конец вектора разомкнутой - системы окажется в точке, отстоящей от начала координат в £, раз левее. При каком-то значении коэффициента р=£р.кр конец вектора совпадает с точкой (—1,/0), что означает недопустимость дальнейшего увеличения коэффициента передачи.[ ...]
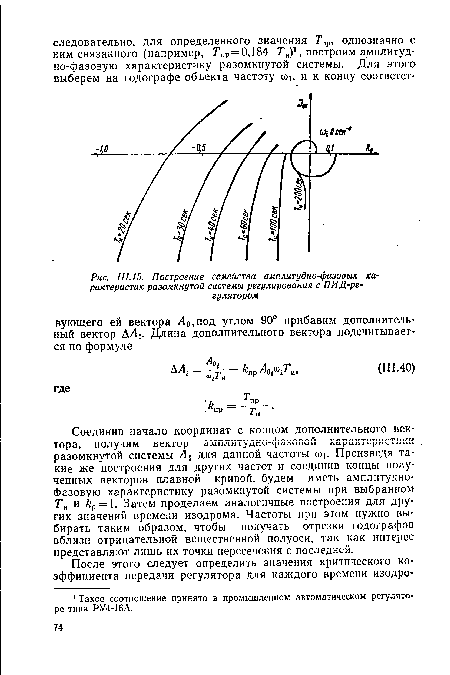
Соединив начало координат с концом дополнительного вектора, получим вектор амплитудно-фазовой характеристики разомкнутой системы Л] для данной частоты соь Произведя такие же построения для других частот и соединив концы полученных векторов плавной кривой, будем иметь амплитуднофазовую характеристику разомкнутой системы при выбранном Ти и р = 1. Затем проделаем аналогичные построения для других значений времени изодрома. Частоты при этом нужно выбирать таким образом, чтобы получать отрезки годографов вблизи отрицательной вещественной полуоси, так как интерес представляют лишь их точки пересечения с последней.[ ...]
Нанеся на график точку с координатами, соответствующими проведенному ранее приближенному расчету настройки регулятора по формулам (III.20) — (111.34), следует убедиться в том, что при этих параметрах система будет устойчивой. В противном случае нужно выбрать другой закон регулирования и снова произвести расчет и необходимые построения.[ ...]
Рисунки к данной главе:
| Построение семейства амплитудно-фазовых характеристик разомкнутой системы регулирования с ПИ Д-ре- |
 |
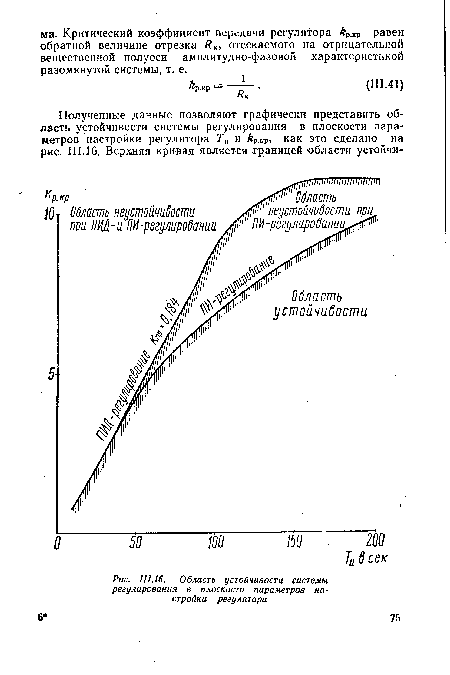
| Область устойчивости системы регулирования в плоскости параметров настройки регулятора |
 |