Существование замкнутой системы регулирования определяется наличием внешней связи между выходным параметром объекта — регулируемым параметром и регулирующим воздействием, приложенным к его входу. В самом объекте направление передачи сигнала противоположно — от входа к выходу. Поэтому внешнюю связь, осуществляемую регулятором, называют обратной связью. В настоящее ©ремя понятия обратной связи и замкнутой системы регулирования стали основными в теории автоматического регулирования и учения об управлении биологическими системами.[ ...]
Система автоматического регулирования может иметь несколько обратных связей, охватывающих «есь объект регулирования или его часть. Такая система называется многоконгурной. При одной обратной связи и одном регулируемом параметре система называется одноконтурной. Если внутри регулятора .имеются местные параллельные обратные связи, то система также относится к одноконтурным.[ ...]
Одной из основных характеристик систем регулирования является способ получения регулирующего сигнала. Наибольшее распространение получили системы, в которых причиной возникновения регулирующего воздействия служит отклонение -регулируемого параметра от заданного значения. В таких системах действие регулятора на объект продолжается до тех пор, пока величина отклонения регулируемого параметра от заданного сигнала окажется не больше допустимого значения. Этот способ регулирования называют принципом Уатта или Ползунова.[ ...]
Наилучшие результаты дает сочетание принципа регулирования по нагрузке (принципа Понселе—Чиколева) и регулирования по отклонению. Такие системы называются комбинированными. Это сочетание иллюстрирует структурная схема, приведенная на рис. III.1 при условии использования связи, обозначенной пунктиром.[ ...]
В последние годы успешно развивается новое направление в теории автоматического регулирования, рассматривающее явление компенсации возмущений, математическим выражением которого стал принцип инвариантности [7]. Под инвариантностью в задачах автоматического регулирования следует понимать достижение полной или частичной независимости регулируемой системы от воздействующего на нее возмущения. Применение принципа инвариантности открывает новые перспективы в построении сложных многоимпульсных комбинированных систем регулирования, высокодинамичных следящих систем, моделирующих и вычислительных устройств. Кроме указанных областей принцип инвариантности имеет важное приложение к системам, рассмотрение которых в общем смысле выходит за рамки вопросов автоматического регулирования и относится к задачам технической кибернетики. Например, к самонастраивающимся системам.[ ...]
Наибольшее распространение получили системы автоматической стабилизации, в которых задающее воздействие постоянно. Их задачей является поддержание регулируемого параметра на определенном уровне. Примером .может служить регулирование температуры в термостате.[ ...]
Систему, в которой задающее воздействие меняется по заранее выработанной программе, называют системой программного регулирования.[ ...]
В том случае когда задающее воздействие пропорционально .какому-либо другому параметру, произвольно изменяющемуся во времени, система называется следящей. Следящая система применяется, например, для дозирования коагулянта пропорционально расходу обрабатываемой воды. Задающее воздействие регулятора дозы раствора коагулянта меняется здесь пропорционально расходу воды, колебания которого носят случайный характер.[ ...]
Рисунки к данной главе:
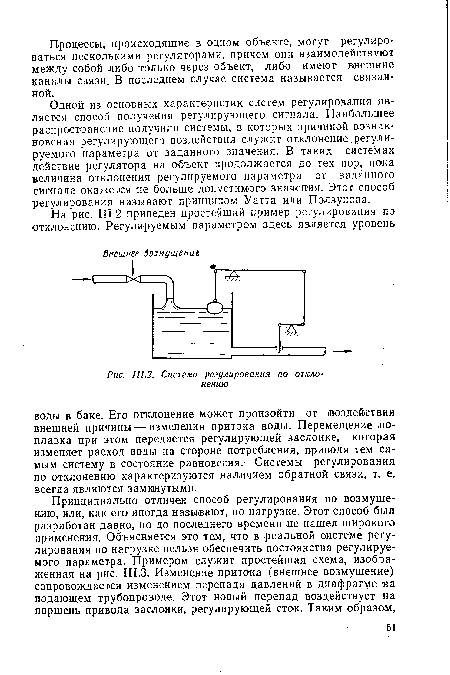
| Система регулирования по откло нению |
 |