В настоящее время используются системы управления двух основных типов — гидравлическая и электрогидравлическая. Их изготовляют в основном четыре компании: «Кумей», «НЛ Шаффер», «Камерон» и «Хайдрил».[ ...]
Для иллюстрации основных концепций далее будет рассматриваться система НЛ (впоследствии названная системой «Кумей»). Хотя оборудование отдельных компаний отличается, однако принципы проектирования остаются одинаковыми.[ ...]
С целью резервирования используются две такие камеры. Каждая из них содержит пилотные клапаны с гидравлическим управлением, которые по команде с поверхности направляют жидкость под давлением для выполнения различных функций.[ ...]
В электрогидравлической системе управления команды подаются в виде электрических сигналов, передаваемых по многожильному кабелю; в результате происходит срабатывание соленоидных клапанов в камере управления. Соленоидный клапан направляет рабочую жидкость под давлением к отверстию пилотного клапана, приводит его в действие, и поток этой жидкости подается в нужную полость для выполнения желаемой функции аналогично тому, как это делается в гидравлической системе управления.[ ...]
Таким образом, электрогидравлическая система работает подобно гидравлической, за исключением характера команд с поверхности и использования соленоидных клапанов в камере управления.[ ...]
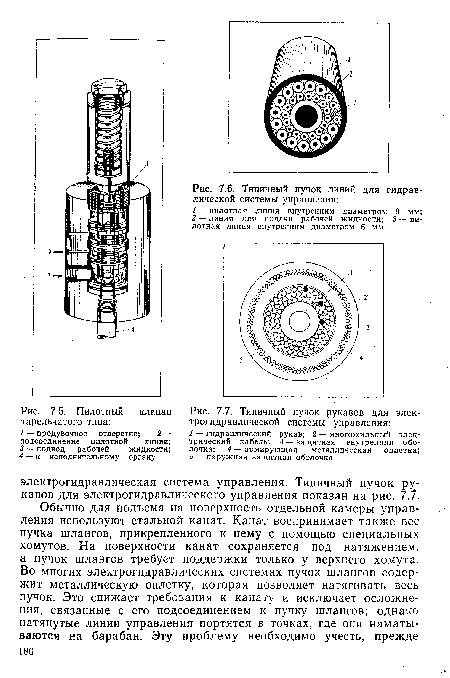
Пилотные клапаны, используемые для направления рабочей жидкости к различным элементам ОП, являются трехходовыми гидравлическими клапанами. При подаче управляющего сигнала они направляют рабочую жидкость для выполнения соответствующей операции. В отсутствие такого сигнала линия управления открыта для сброса рабочей жидкости в море через пилотный клапан. В подводных операциях используются пилотные клапаны двух типов: тарельчатый (рис. 7.5) и со скользящим уплотнением. Основное требование к ним состоит в том, что при аварии линия должна быть открыта в море; в противном случае может произойти гидравлическая блокировка, в результате чего намеченную операцию нельзя будет выполнить.[ ...]
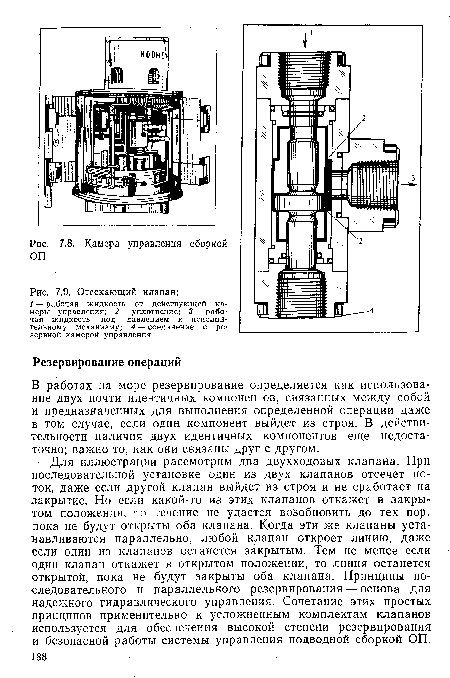
Гидравлические системы управляют пилотными клапанами через отдельные пилотные линии, идущие с поверхности. Это армированные трубки внутренним диаметром 6 или 8 мм, причем они достаточно жесткие, чтобы расширение было минимальным. Для выполнения операции жидкость подается в линию до тех пор, пока давление не станет достаточным для срабатывания клапана. Расширение пилотной линии замедляет реакцию клапана. Рабочая жидкость подается по линии большого диаметра, обычно располагаемой в центре пучка пилотных линий (рис. 7.6). Линия для рабочей жидкости должна иметь внутренний диаметр не менее 25 мм, предпочтение отдается линиям большего диаметра.[ ...]
Таким образом, система управления работает непрямым способом. Рабочая жидкость всегда подведена к пилотным клапанам. Последние срабатывают при подаче давления в отдельные пилотные линии с поверхности. Вытесняемая при выполнении операции жидкость сбрасывается в море.[ ...]
Сравнительно новой для плавучих буровых судов является мультиплексная электрогидравлическая система. Она требует только два кабеля для передачи всех сигналов каждой камере управления и от них. Для надежности может быть использовано более двух кабелей. Сигналы кодируются в соответствии с предстоящей операцией. В камере управления логическая схема считывает сигнал и осуществляет нужную операцию через соленоидный и пилотный клапаны.[ ...]
Рисунки к данной главе:
| Пилотный клапан |
 |
| Типичный пучок рукавов для Электр оги драв лической системы управления |
|
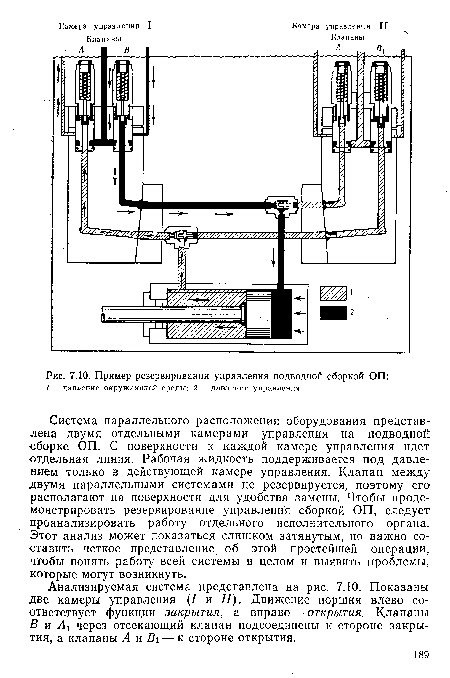
| Отсекающий клапан |
 |
| Пример резервирования управления подводной сборкой ОП |
 |
| Изменения объемного фактора и давления предварительной зарядки аккумуляторных емкостей в зависимости от глубины моря |
 |