Метод распознавания образов иногда определяют как кластерный анализ, поскольку он связан с введением кластеров (пучков, групп, образов). Такой анализ активно разрабатывается в исследованиях автоматических систем контроля. Применение его к задачам краткосрочного прогноза загрязнения воздуха выполнялось в работах японских авторов, доложенных на Международном симпозиуме в Киото в 1977 г. (см. п. 4.3).[ ...]
В качестве исходного материала использованы результаты метеорологических наблюдений и непрерывной регистрации концентрации N0 и О в одном из районов Токио в период с мая по октябрь 1972 г.[ ...]
Ставится задача прогноза составляющих вектора т хотя бы на несколько часов, что, как отмечают авторы, может способствовать уменьшению ущерба, наносимого фотохимическим смогом. Прогнозу т способствует группировка ежечасных данных с использованием кластерного анализа. Для этого вводится пространство кластеров на векторах X(i) = [m(i), M(i)], где i=l, 2, ... ..., / — номер наблюдения.[ ...]
Здесь для вектора X (¿), принадлежащего кластеру П (ß), использовано обозначение X(II(ß), ¿), /ß — количество элементов в кластере Пр. Количество используемых кластеров s последовательно принимается равным 1, 2 и т. д., причем этот процесс прекращается на том этапе, когда дальнейшее увеличение s начинает приводить к резкому изменению х.[ ...]
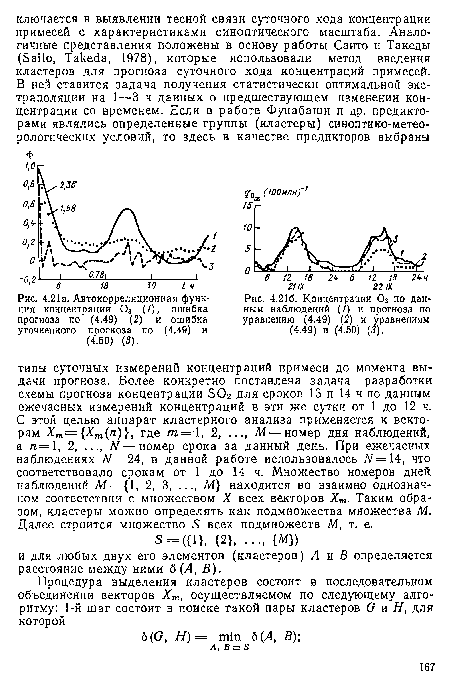
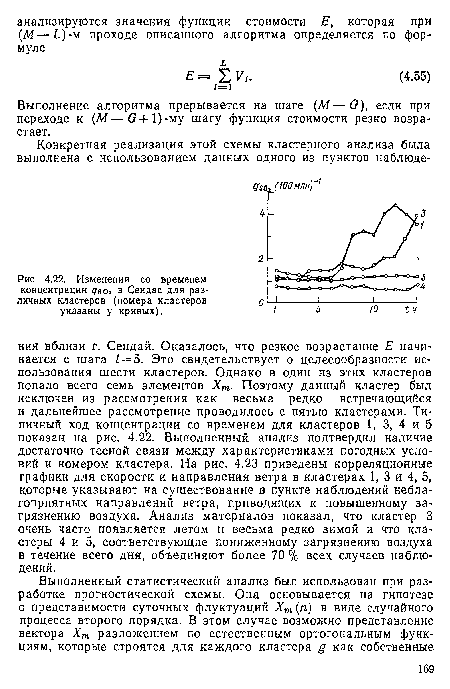
Выполнена также оценка значимости слагаемых при прогнозе концентрации оксидантов. В то время, как стандартное отклонение концентраций О в использованной выборке равнялось 2,36(100 млн)“1, стандартная ошибка прогноза на 1 ч при учете только /по достигала 1,58(100 млн)-1. При этом автокорреляционная функция ошибки прогноза, как видно из рис. 4.21а, не соответствовала белому шуму. Добавление Ат позволило уменьшить стандартную ошибку прогноза на 1 ч до 0,78(100 млн)-1 и одновременно улучшить автокорреляционную функцию ошибки прогноза. Сопоставление фактических значений концентрации с прогностическими (по т0 и по т0+Дт) для двух исследованных дней дано на рис. 4.216.[ ...]
Выполнение алгоритма прерывается на шаге (М—£?), если при переходе к (М—£? + 1)-му шагу функция стоимости резко возрастает.[ ...]
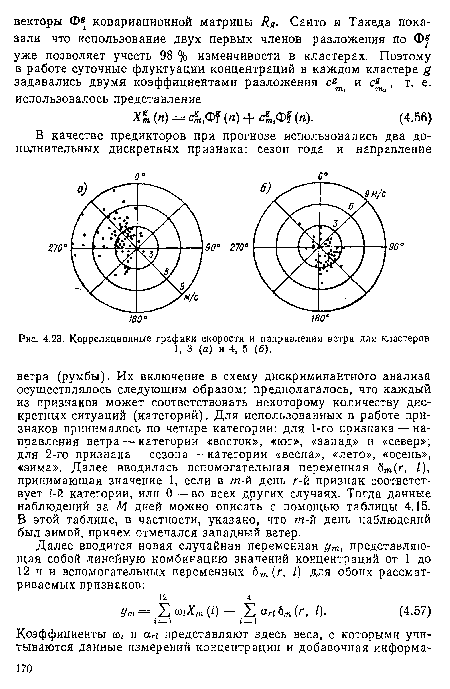
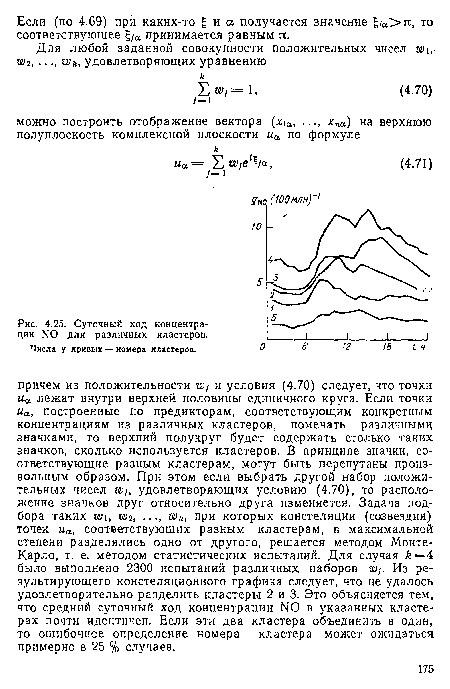
Числа у кривых — номера кластеров.[ ...]
Рисунки к данной главе:
| Автокорреляционная функция концентрации 03 (1), ошибка прогноза по (4.49) (2) и ошибка уточненного прогноза по (4.49) и (4.50) (<?). |
 |
| Концентрации Оз по данным наблюдений (1) и прогноза по уравнению (4.49) (2) и уравнениям (4.49) и (4.50) (3). |
|
| Изменения со временем концентрации ¿7301 в Сендае для различных кластеров (номера кластеров указаны у кривых). |
 |
| Корреляционные графики скорости н направления ветра для кластеров |
 |
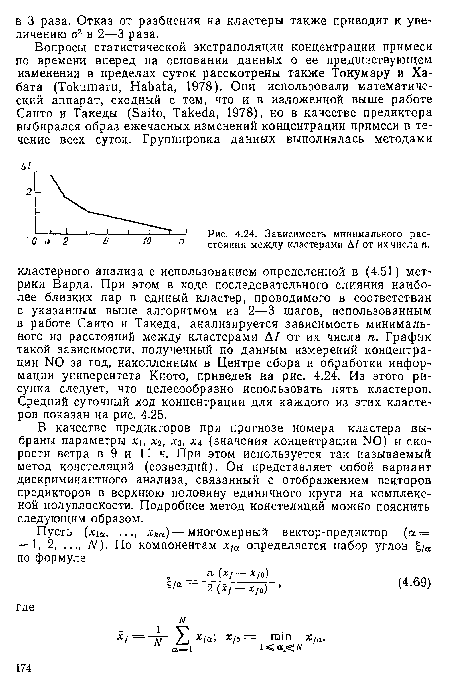
| Зависимость минимального расстояния между кластерами А/ от их числа п. |
 |
| Суточный ход концентрации N0 для различных кластеров. |
 |
| Данные измерений (/) и прогноза (2) концентрации qno для пяти дней (а—<?). |
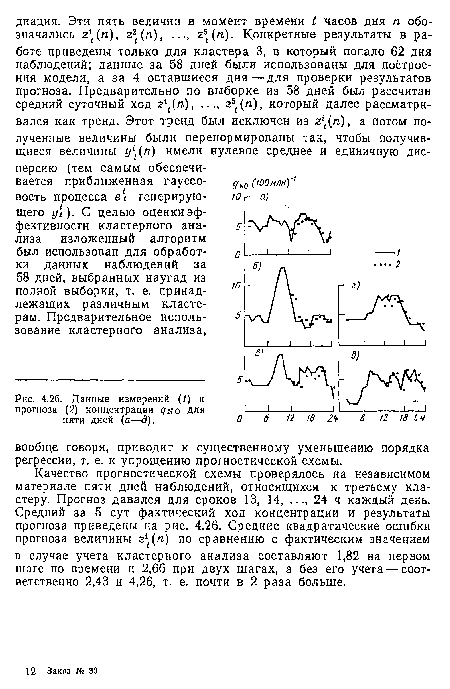 |