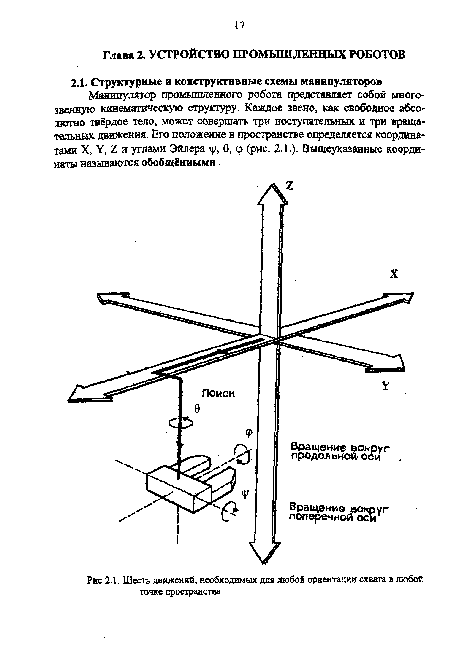
Манипулятор промышленного робота представляет собой многозвенную кинематическую структуру. Каждое звено, как свободное абсолютно твёрдое тело, может совершать три поступательных и три вращательных движения. Его положение в пространстве определяется координатами X, У, г и углами Эйлера ц), в, (рис. 2.1.). Вышеуказанные координаты называются обобщёнными.
Скачать страницу
[Выходные данные]
